|
|
|
ATV CC, LE CENTRE DE CONTROLE DE L'ATV
C'est à la fin de 1998 que l'ESA décide
d'implanter le centre de contrôle de l'ATV au CST à Toulouse, le CNES étant
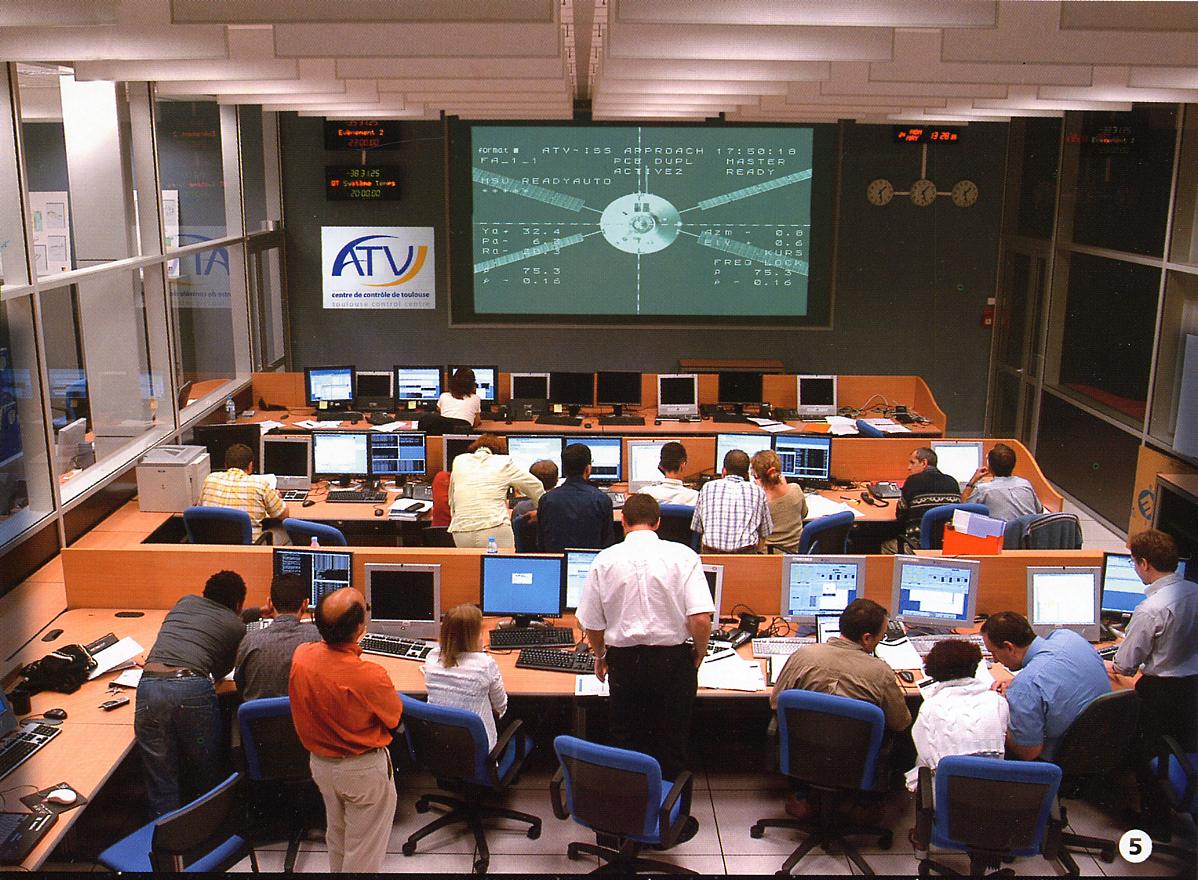
le contractant principal des opérations ATV. C'est le bâtiment Fermat qui abrite les trois
salles de contrôle ATV et les 40 personnes chargés des missions ATV.
La revue d'aptitude à l'intégration système s'achève le 13 août et la Revue critique de conception en novembre. La Revue de mise en oeuvre des opérations de l'ATV-CC a commencé début juillet et s'est terminée fin septembre. Les premiers essais de vérification système se sont déroulés du 18 au 20 novembre. En 2004, Les essais de validation système, notamment les essais d’endurance réalisés avec le système de satellites de poursuite et de relais de donnés de la NASA et le centre ATV-CC donnent de bons résultats. L’infrastructure de l’ATV-CC est en voie d’achèvement et les produits opérationnels sont en préparation. L’ATV a passé avec succès en septembre la revue d’aptitude aux opérations de vol. Les premiers essais des interfaces entre l’ATV-CC et le centre de contrôle des missions de Houston d’une part et le simulateur du module de service russe d’autre part se sont déroulés correctement. Dans l'été 2005 a lieu une série de tests de validation de ses installations. Le 9 août, l’atterrissage de la navette Discovery, de retour sur Terre, a pu être diffusé en direct, dans d’excellentes conditions, grâce au centre de contrôle de l’ATV: écran géant, liaison audio et vidéo avec Houston. Cette retransmission était emblématique, car la réalisation de la mission ATV est liée à la poursuite de l’assemblage de l’ISS par les navettes américaines.
Même si l'ATV est un
véhicule autonome, toutes ses fonctions de bord sont contrôlées depuis
le sol, en particulier le vol dynamique. Le
centre de contrôle de Toulouse, l'ATV Control Center permet de réaliser le suivit du
vol depuis le lancement jusqu'au retour. La
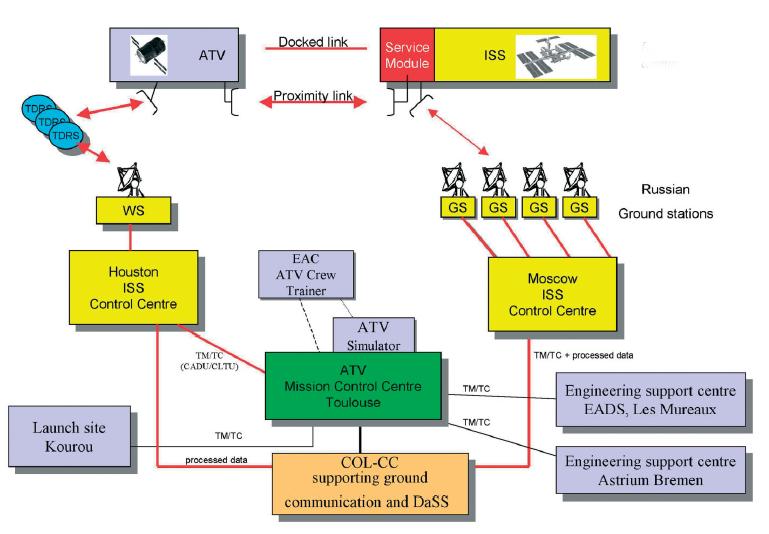
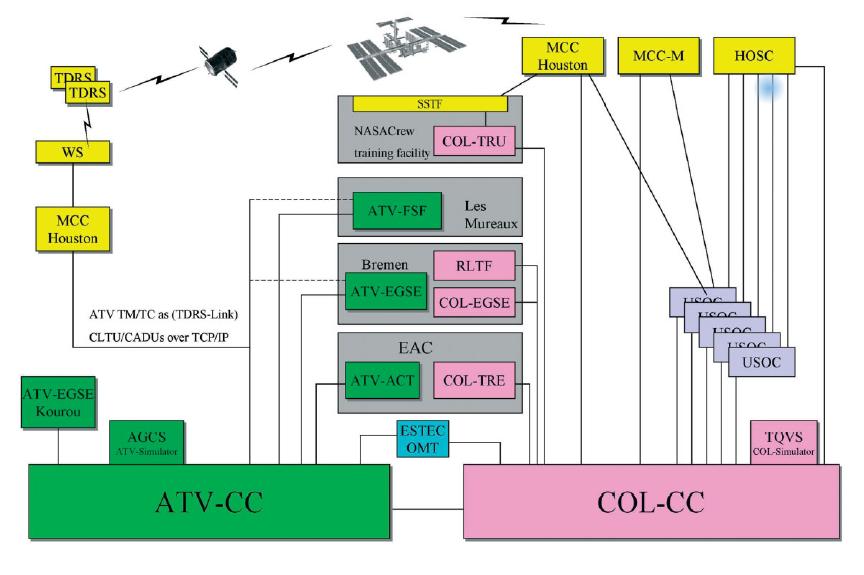
NASA via les satellites TDRS et le MCC de Houston en liaison avec le
module Zvezda contrôle le vol libre et l'approche jusqu'à l'amarrage.
Le centre de Toulouse gère
avec le MCC de Houston les télécommandes et la télémétrie. L’ATV-CC met
en place le plan de mission, prépare puis valide les outils de contrôle.
Il suit les différentes phases du vol de l’ATV, l’amarrage, les opérations
de stabilisation et de transfert d’orbite, puis à la fin de la mission,
le détachement du vaisseau de l’ISS, la désorbitation et la rentrée
dans l’atmosphère.
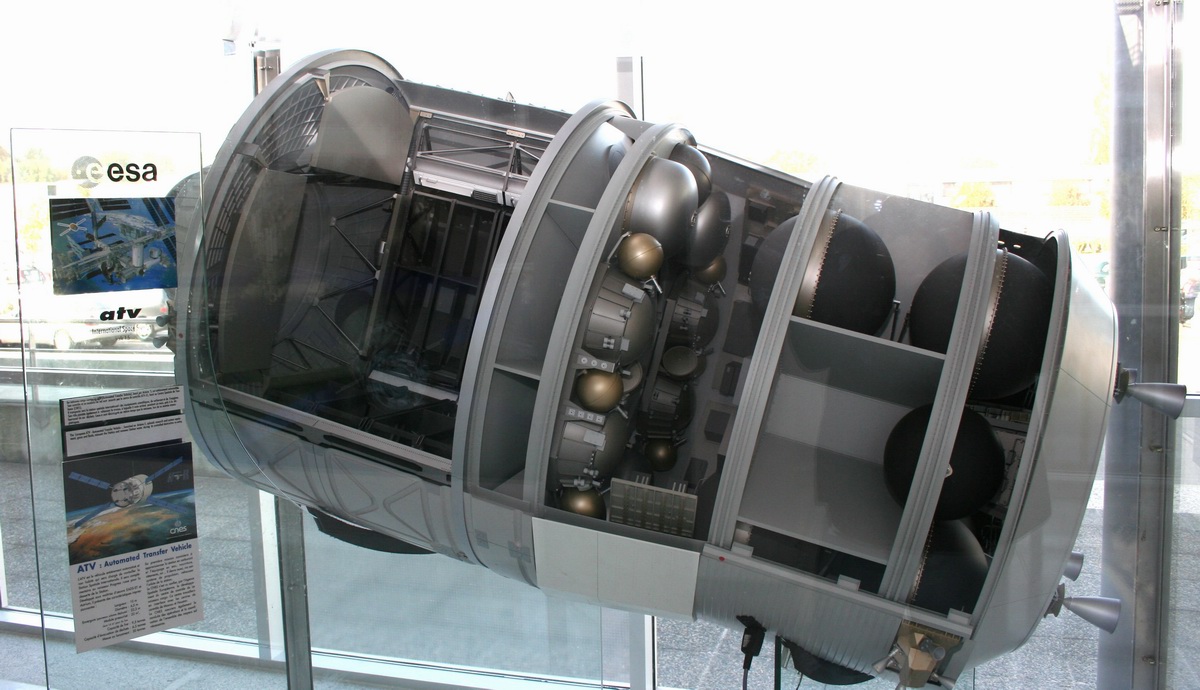
Sous l'autorité de l'ESA, le centre ATV CC est responsable de la préparation et de la validation des outils de contrôle utilisé par les 30 personnes des salles de contrôles pendant la mission. Le centre est aussi responsable des plans de mission avec tous les changements éventuels. Le centre est responsable de l'orbitographie et de la localisation du véhicule au moment de l'approche vers ISS. Une lourde tache qui nécessite un haut degrés de technicité, une première en Europe. Après son lancement de Kourou, l'ATV est sous la responsabilité du centre de Toulouse. Après la séparation de son lanceur il navigue trois jours dans l'espace avant de s'amarrer à l'ISS. Accouplé au module russe Zvezda, le rôle de l'ATV est d'une part rebooster la station et apporter des vivres et équipements aux astronautes. Pendant les 6 mois attachés à la station, il permet d'économiser les gyroscopes de la station. Avant la séparation et la désintégration dans l'atmosphère au dessus du pacifique, l'ATV est rempli de 6500 kg de détritus. C'est le centre de Toulouse qui est charger de sa désintégration. Le centre ATV CC travaille avec le CSG de Guyane lors du lancement et avec le MCC de Houston lors des opérations en orbite (rendez-vous amarrage et séparation). En cas de problème lors de l'amarrage, le centre de Toulouse comme l'équipage d'occupation peut mettre en route le système anti collision CAM Collision Avoidance Manoeuvre pour éloigner le véhicule de la station avant de tenter une autre approche le lendemain. Le ATV CC est relie au autres centres de contrôle et reste en contact tout au long de la mission grâce au satellites relais, américain TDRS et européen Artemis et le réseau de communication européen, Interconnection Ground Subnetwork IGS, basé à Oberpfaffenhofen en Allemagne le GSOC (German Space Operations Center of DLR) qui contrôle aussi le module Columbus. SALLES DE CONTROLE ET CONTROLEURS DE VOL
Trois équipes de travail travaillent au ATV CC dans trois salles séparées par des vitres, la salle ESA ATV Operations Management Team (OMT) sur la droite, chargée de toutes les opérations et les activités d'exécution en temps de crise, l'équipe Flight Control au centre en charge des opérations ATV et l'équipe Engineering Support sur la gauche chargée des analyses et des expertises de la mission complète. La salle de contrôle principale est dédiée aux opérations de vol réalisées par l'équipe de contrôle de vol du CNES, chapeautée par un directeur de vol. Ce FD est en charge des décisions en temps réel en coordination avec l'équipe de l'ESA ATV operations management qui elle aussi travaille dans la même salle. l'équipe ESA ATV operations managment est en contact direct avec Houston et le centre des vols habités de Moscou. Il n'y a pas des CapCom comme lors des vols habités, mais le FD peut en cas d'urgence contacter l'équipage de la station en orbite. Une autre salle, la FDC Flight Dynamics Control est dédiée aux officiers de vol dynamique chargés de la trajectoire orbitale de l'ATV, en utilisant les donnes de vol en temps réel. Cette seconde équipe est chapeauté par des spécialistes du CNES. Ils peuevtn aider le FD en situation extrême. La troisième salle, Engineering Support Team abrite les experts de l'ESA et EADS capable d' assister le FD et de réponse à toute les situations d'urgence. Le langage officiel est bien sur l'anglais même lors des conversations avec le centre de Moscou. 30 personnes y travaillent.
|
|||||||||