|
|
|
CARACTERISTIQUES DE L'ATV
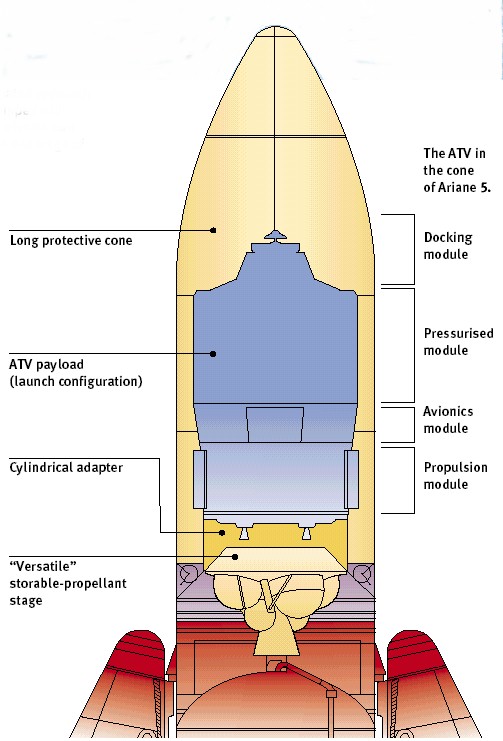
LE MODULE DE SERVICE Le module de service abrite tous les systèmes vitaux : propulsion, puissance électrique, calculateurs et principaux équipements avioniques. Une partie importante de ce module est occupée par les réservoirs d’ergols et de pressurisation, les propulseurs et leur circuit d’alimentation, ainsi que l’électronique de commande de la propulsion. Une autre partie est consacrée à l’essentiel des équipements avioniques, regroupant dans une baie calculateurs, batteries, processeurs de communication, unités de mesure et de contrôle, etc. Les panneaux solaires sont fixés de façon radiale sur le module de service par leurs moteurs d’orientation. Le système de fixation et de séparation avec l’étage supérieur d’Ariane 5, utilisant un système à sangle, équipe la partie inférieure de ce module. Les structures du module de service sont réalisées en alliage léger d'aluminium. Elles sont protégées par un bouclier anti-météorite et anti-débris assemblé sur la structure primaire (1ère couche en Aluminium 6061 et Titane 6, 2ème couche en feuilles de Nextel et Kevlar). Sa masse est de 5320 kg. Le système de ravitaillement en ergols RFS (ReFueling System) de conception russe est dérivé des systèmes utilisés sur les vaisseaux russes. Il consiste en deux sous-ensembles complets qui contiennent chacun les deux ergols utilisés par la station et les véhicules russes (UDMH et N2O4), trois réservoirs de pressurisation à l’hélium ainsi que l’ensemble des détendeurs et des vannes hydrauliques et pneumatiques. Les 800 kg ergols sont acheminés vers l’ISS par deux lignes qui sont connectées au système propulsif de la station par le système d’arrimage. PUISSANCE ELECTRIQUE Le système de puissance électrique de l’ATV repose sur quatre panneaux solaires réalisés en fibre de carbone renforcé, quatre batteries rechargeables de 40Ah, quatre unités de distribution et de contrôle de la puissance électrique et un boîtier redondé de connexion au système de puissance de la station. Les panneaux solaires sont déployables et mobiles autour de leur axe de façon à suivre le soleil. Ils sont constitués chacun de quatre parties recouvertes de cellules au silicium (SI-HI Eta2), délivrant ensemble jusqu’à 4,8 KW de puissance (3800 W en fin de vie). L’ATV est ainsi autonome en vol libre et la plupart du temps lorsqu’il est accroché à l’ISS, minimisant ainsi le recours à l’énergie électrique de la station (de 300 à 800 W). CONTROLE THERMIQUE Le système de contrôle thermique de l’ATV est assuré d’une part grâce à une isolation thermique de l’ensemble du véhicule (isolation multi-couche et peintures conductrices) et à des réchauffeurs électriques judicieusement placés, d’autre part grâce au regroupement de certains équipements avioniques dans une baie contrôlée thermiquement par des radiateurs et des caloducs dont la conductance, variable, est pilotée par le calculateur de bord de façon à minimiser également le recours à l’énergie de la station. Le monitoring permet le contrôle en cas de feu, la circulation d'air et la température de l'air. NAVIGATION, GUIDAGE ET COMMUNICATIONS Le système de navigation, guidage, pilotage et le système de propulsion de l’ATV repose sur des récepteurs GPS, une plate-forme gyroscopique, des senseurs stellaires, des vidéomètres et télémètres laser, des accéléromètres. L’ATV est équipé de deux
systèmes de communication hertzienne en bande S. Le premier lui permet de
communiquer avec le centre de contrôle au travers du système de satellite
relais TDRS. Utilisant 3 antennes pour garantir que le lien de communication est
maintenu en toute circonstance, ce système permet aussi à l’ATV de stocker
des données pendant les périodes d’interruption des communications. PROPULSION Son système propulsif PRSS (Propulsion and Reboost Sub System), basé sur l'ensemble propulsif de l'étage EPS d'Ariane 5 comprend 28 moteurs de 220 N de poussée pour le contrôle d’attitude et quatre moteurs de 490N pour la propulsion principale. Les moteurs sont alimentés par huit réservoirs en titane équipés d’un dispositif de rétention capillaire. Ces réservoirs contiennent jusqu’à sept tonnes de MMH et de N2O4, dont une utilisée par la station. La pressurisation des ergols est assurée par de l’hélium stocké dans deux réservoirs haute pression bobinés à l’aide de fibres de carbone. L’ensemble des vannes et des propulseurs est commandé par quatre unités connectées au pool de calculateurs central. Ces deux systèmes permettent à l’ATV non seulement de réaliser les manoeuvres pour rejoindre l’orbite de l’ISS, mais aussi de contrôler son mouvement suivant les trois axes, d’accoster, puis de s’arrimer en douceur à la station et de réhausser son orbite. Par leur conception et leur utilisation, ces systèmes permettent à l’ATV de poursuivre sa mission après une panne. Ils lui permettent aussi de surveiller par lui-même, à l’aide de ses propres senseurs utilisés de façon différenciée, qu’il est sur une trajectoire sûre vis à vis de la station ou de déclencher une manoeuvre qui le placera sur une trajectoire d’évitement. En ultime recours, un système spécifique et indépendant permet encore à l'ATV d'assurer, par lui-même, la sécurité de la station lors de la phase d'approche : un ensemble de calculateurs, gyromètres, propulseurs et batteries est implanté uniquement à cet effet. Ce système permet de mettre à coup sûr l'ATV sur une trajectoire d'évitement. AVIONIQUE Le système de traitement des données et le logiciel de bord. Le coeur informatique de l’ATV s’appuie sur un pool de trois calculateurs, contrôlant l’ensemble de ses équipements par quatre bus numériques internes et communiquant avec la station par l’intermédiaire de deux bus de données. En complément, un jeu d’équipements russes permet aussi d’établir des liaisons filaires entre l’ATV et la station, tout en assurant la connexion de l’ATV au système de puissance électrique de la station ainsi que le contrôle des systèmes d’arrimage et de ravitaillement en ergols. Deux calculateurs supplémentaires sont dédiés au système de sécurité ultime en phase d’approche. Le logiciel de bord de l’ATV est conçu pour automatiser le fonctionnement du véhicule tout en préservant la flexibilité de sa mise en oeuvre et sa surveillance par le centre de contrôle, la station et son équipage. L’ATV fonctionne suivant des modes pré-établis maintenus automatiquement par le logiciel de bord. Il change de mode soit sur commande de la station, soit au fur et à mesure de l’exécution des séquences de commandes qui sont chargées par le centre de contrôle ATV. L’automatisation du fonctionnement permet aussi à l’ATV de détecter une défaillance éventuelle, d’éviter sa propagation et d’utiliser les redondances pour maintenir le fonctionnement nominal. Dans les situations qui ne sont pas récupérables par les automatismes bord, l’ATV se place automatiquement dans un mode de survie qui permet au sol d’intervenir. Pendant l’approche de la station, avant de passer en survie, l’ATV - grâce à son système de sécurité ultime en approche - exécute d’abord une manoeuvre d’évitement. Afin d’assurer la surveillance du véhicule, le centre de contrôle de l’ATV, de même que la station, disposent d’un flux de données envoyé ou enregistré par l’ATV en permanence. Ils disposent aussi, au-delà des commandes utilisées en situation normale, de commandes et d’automatismes spécifiques qui permettent, en situation ultime et sans utiliser tous les automatismes nominaux, de mettre l’ATV en sécurité vis-à-vis de la station et d’intervenir directement sur le véhicule.
LE MODULE DE FRET Le module de fret comporte une partie pressurisée qui permet à l'équipage d'y pénétrer pour décharger le matériel, y charger les déchets, et transférer dans la station l'eau, l'air, l'azote et l'oxygène. Ce module pressurisé, constitué d'une coque en alliage léger Aluminium, faite de panneaux usinés, formés puis soudés, est fermé par le système d'arrimage. Il comporte aussi une partie non-pressurisée qui contient le système spécifique de stockage et de transfert d'ergols vers le module de service de la station, ainsi que les réservoirs d'eau et de gaz. Ce module, entièrement protégé par un bouclier anti-météorites et anti-débris, comporte sur sa face avant des propulseurs de contrôle d'attitude, les senseurs nécessaires au rendez-vous, ainsi que les cibles optiques et les feux de position utilisés par l'équipage pour surveiller l'arrivée et l'arrimage de l'ATV. Sa masse est de 5150 kg. La capacité d'emport est de 2 x 0.314 m3 et 2 x 0.414 m3 pour chacun des 8 rails en titane, 1,146 m3 devant sur 4 de ces 8 racks. . Au total, la masse de fret maximale est de 7667 kg. Masse de fret : SYSTEME D'AMARRAGE L'ATV adopte le système d'amarrage de la partie russe de la station ISS afin de réduire les coûts de développement. Ce système RDS Russian Docking System est utilisé sur les vaisseaux Soyouz TM et Progress M. D'un diamètre externe de 130 cm, il pèse 235 kg. Un accord d'utilisation est signé en mars 1996, l'ESA fournissant le Data Managment System DMS R pour le module Zweda et recevant en contre partie deux unités de vol du système d'amarrage. Le RDS permet un assemblage en toute sécurité des 20 tonnes de l'ATV aux 450 tonnes de la station afin de pouvoir ensuite réaliser les manoeuvres de rehausse d'orbite. L'ATV est équipé de la partie "male" du système l'ADA composé d'un sas d'un diamètre de 80 cm, d'un mécanisme d'alignement et d'une sonde avec verrous. Le module Zvezda est lui équipé de la partie "femelle" PDA constitué d'un entonnoir et d'un sas. Après sa séparation du lanceur, l'ATV part à la poursuite de la station. Le mat extensible de l'ADA est sortie d'un mètre environ. Au bout se trouvent la tête de la sonde avec ses quatre verrous. Lorsque l'alignement est correct, la sonde entre en contact avec l'entonnoir du PDA du module Zvezda qui le guide vers le réceptacle. Les quatre contacts sous les verrous permettent à l'ATV de réaliser une dernière poussé vers l'avant afin rentrer la sonde dans le réceptacle de l'entonnoir. Lorsque la sonde est au fond, un autre contact permet la rétraction de la sonde et l'alignement des deux vaisseaux (amarrage doux). La rétraction continue temps jusqu'à ce que les joints se touchent et les 4 connecteurs électriques et pneumatiques se ferment. Huit verrous disposés sur le pourtour permettent la jonction mécanique des deux systèmes (amarrage dur). La tête de la sonde est ensuite déverrouillée afin de permettre l'ouverture du sas lorsque l'égalisation des pressions est faite. Les astronautes commencent d'abord par ouvrir l'écoutille coté Zvezda (entonnoir) puis avec un outil ils poussent l'écoutille de l'ATv à l'intérieur de celui ci. 16 caches sont installés sur le pourtour du tunnel afin d'augmenter l'épaisseur des connections. Pour les opérations de séparation, les astronautes enlèvent les caches et ferment les écoutilles. L'air entre les deux est pompé et les pressions vérifiées. Les 8 verrous du PDA-ADA sont ouverts, des ressorts se chargeant de séparer les deux vaisseaux. Le système russe RDS est considéré comme très fiable. Le seul problème majeur serait la panne du moteur de rétraction de la sonde qui n'est pas doublé par manque de place. Quatre pyro permettent de séparer l'ADA de l'ATV en cas d'amarrage avorté. Si la séparation ne peut intervenir, d'autres pyro permettent de "casser" les 8 verrous de maintien de l'ADA-PDA.
|
||||