|
LE LUNAR ROVER VEHICLE
|
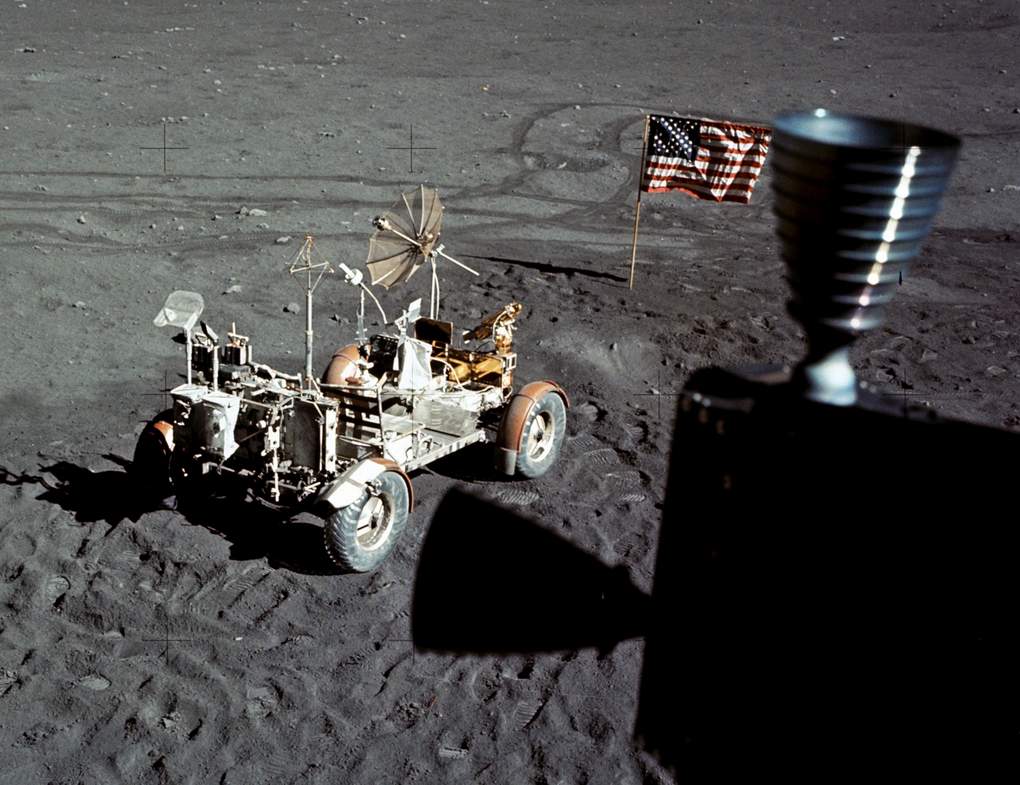
La société Boeing a développé et construit
la jeep lunaire, le LRV pour Lunar Rover Vehicle pour la NASA et son programme Apollo. Le véhicule est conçu pour le
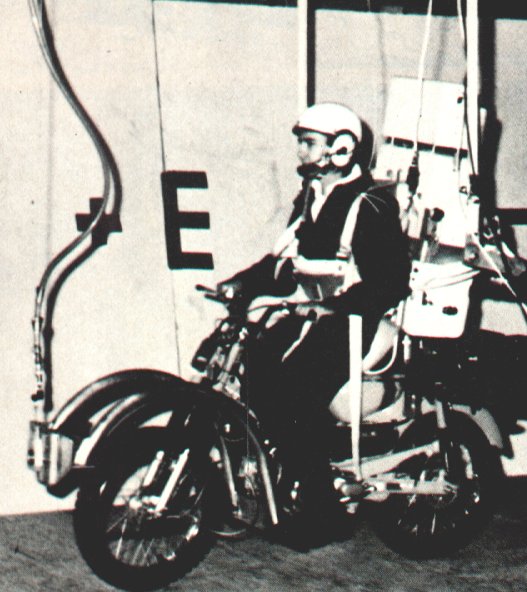
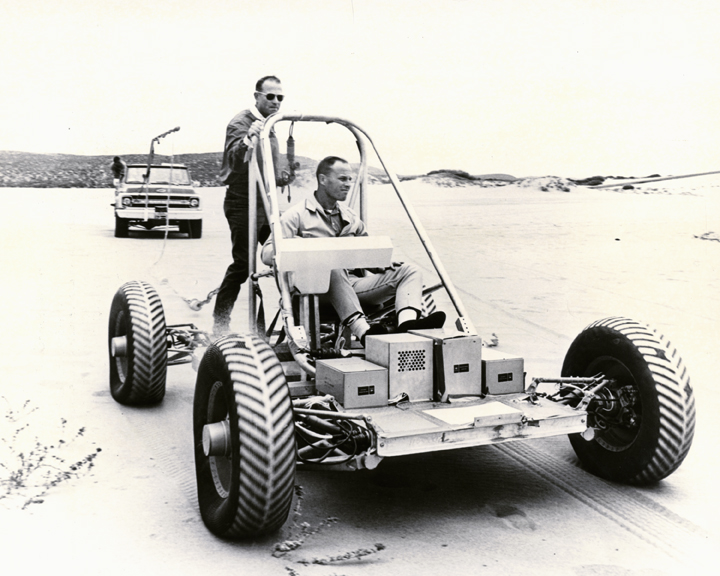
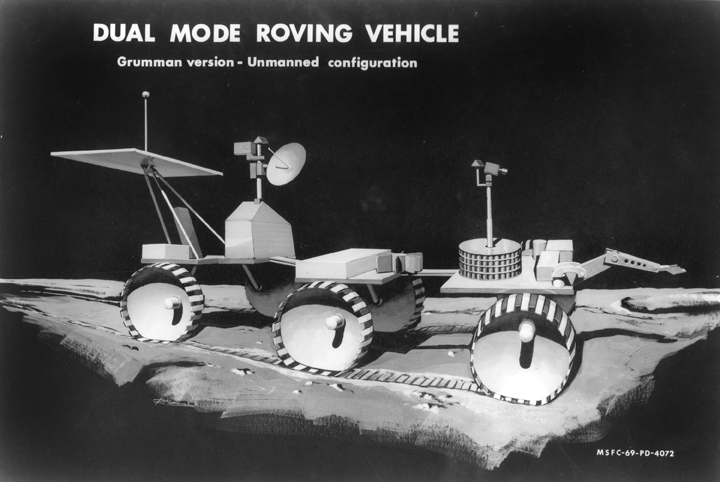
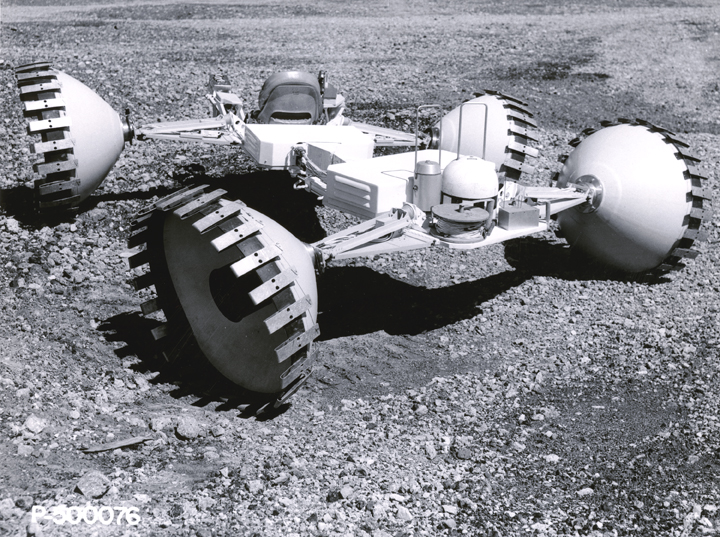
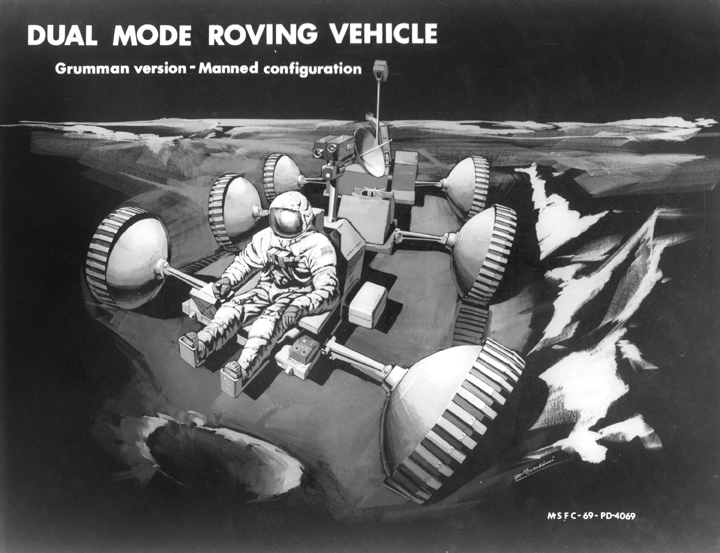
transport de 2 astronautes et leurs équipements sur la lune. Les premières traces de roues sur la lune ont été réalisé par une petite brouette appelée le MET Modularized Equipment Transport. C'est la mission Apollo 14 qui l'emporte en 1971 pour une seule et unique mission. Bien avant, les ingénieurs de la NASA avaient conçue deux projets de mobylette lunaire qui n'ont jamais roulé sur la lune. En fait, quatre roues se sont avéré plus stable que deux particulièrement en gravité réduite de 1-6 g. Les premiers projets de rover remonte à 1964 avec le MOLAB (Mobile Laboratory) étudié par l'équipe de von Braun capable de transporter deux hommes et 3 tonnes de matériel dans une cabine fermé sur 100 km pendant 2 semaines. C'est cette durée trop importante pour un LM classique qui a fait abandonné le projet. En fait, plusieurs modes de propulsion ont été étudié, la roue bien sur mais aussi les chenilles, les sauts et la marche avec le LSSM et les "moon buggies". Le LSSM, Local Scientific Survey Module était un véhicule à 6 roues de 450 kg qui ne pouvait transporter qu'un seul homme alors que pour la sécurité il fallait qu'un astronaute puisse secourir l'autre en cas de problème.
C'est à partir de ces différents concepts que le LRV fut étudié. Mais le principal problème était le poids, la masse embarquée sur le LM étant limitée à 218 kg. Il faudra à Boeing choisit en octobre 1969, 17 mois pour assurer le développement du LRV alors que 60 mois ont été nécessaire à Hamilton pour livrer le premier scaphandre, 66 mois à North American Rockwell pour livrer le premier CSM et 52 mois à Grumman pour livrer le premier LM. 38 millions $ seront nécessaire pour la construction de 8 modèles de test, 4 modèles de vol dont le dernier restera en pièces détachés après l'annulation d'Apollo 19 et des dizaines de maquettes. Avril 1969, von Braun met en place une
équipe d'étude sur le Rover au centre Marshall. L'exploration de la surface
lunaire à pied étant limité, l'ajout d'un véhicule roulant augmenterait le
rayon d'action des astronautes à partir de la mission Apollo 16, première mission type
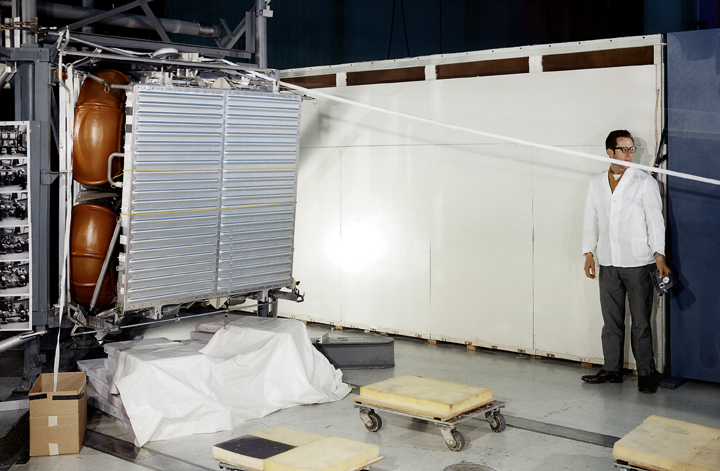
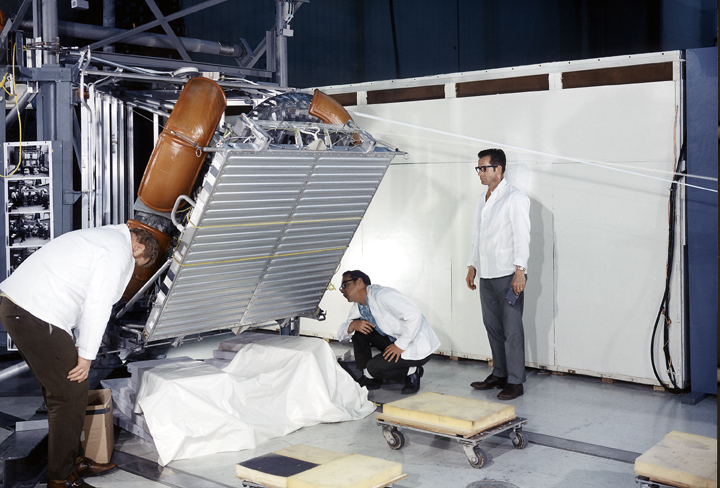
J. 4 véhicules de vol seront réalisés pour Apollo 16, 17, 18 et 19. _ Un prototype d'essais de compatibilité avec le LM; _ Deux exemplaires au 1/6 de masse pour étudier le système de déploiement du LM par les astronautes; _ Un prototype de mobilité pour la mise au point du système propulsif (roues, moteurs, suspension); _ Un exemplaire de vibration pour déceler des faiblesse dans la structure; _ Un exemplaire de qualification pour les principaux essais de vibration, dans le vide, à haute et basses températures;
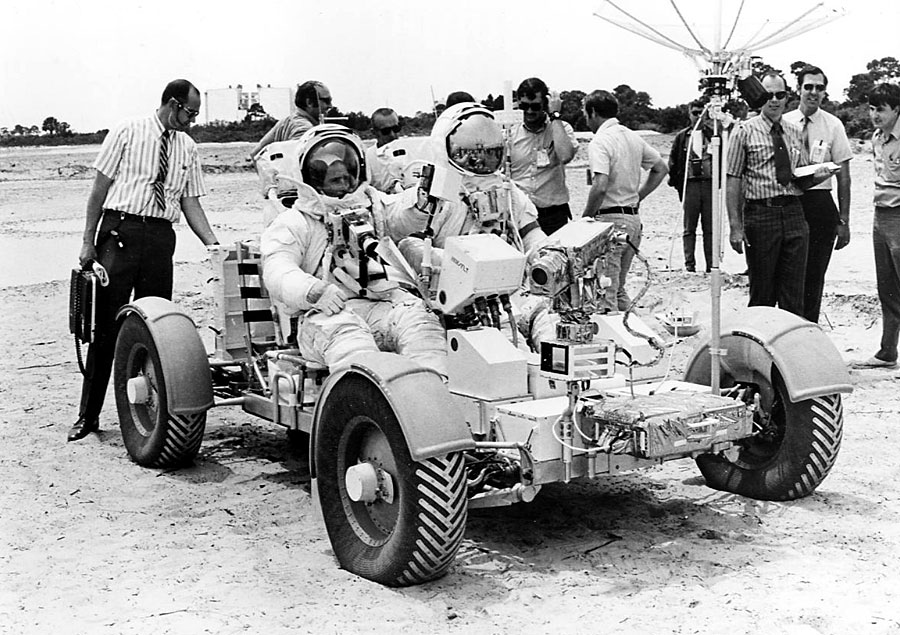
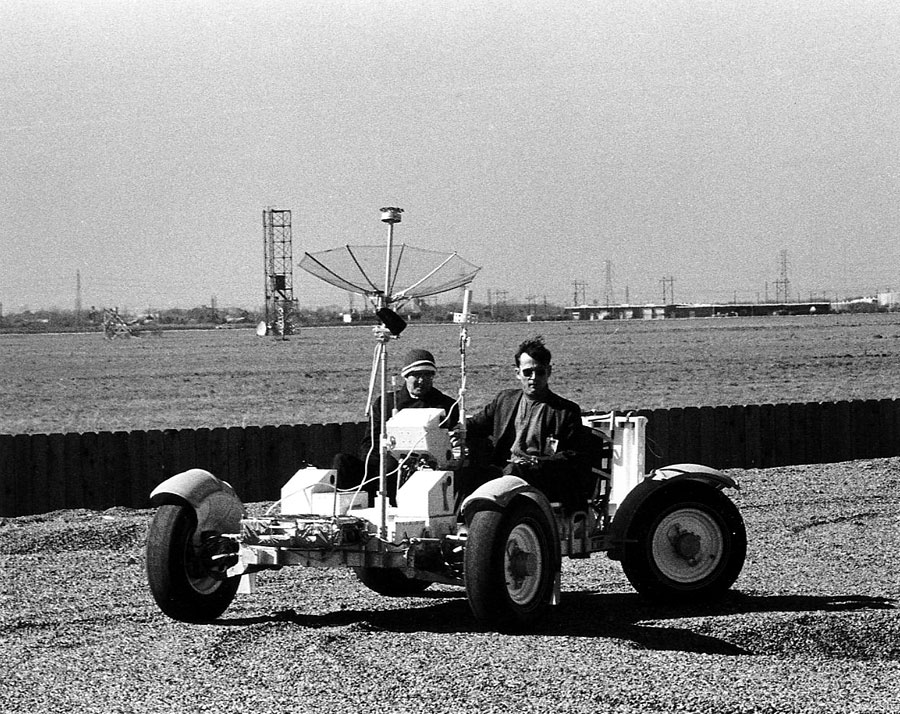
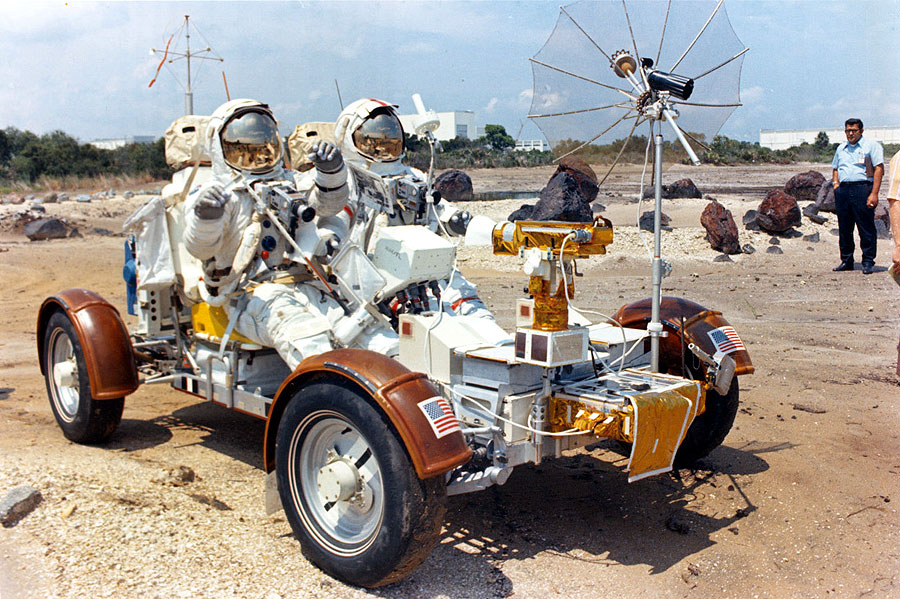
_ Un exemplaire d'entrainement 1G pour les astronautes et la presse; Réalisé par Delco Electronics, il pèse 431 kg. Les moteurs actionnant les roues sont plus puissant que sur le modèle de vol (1 CV). L' entraînement des astronautes à la conduite du Rover a été très rude. Le rover 1g était équipés de roues et batteries classique rechargeable d'une autonomie de une heure, les systèmes de régulation étant absents. Il s' est déroulé à Houston, en Arizona et au KSC. Avant de disposer de ce modèle, l'entrainement avait lieu avec le Grover réaliser par l'US Geological Service, une pale copie du vrai LRV.
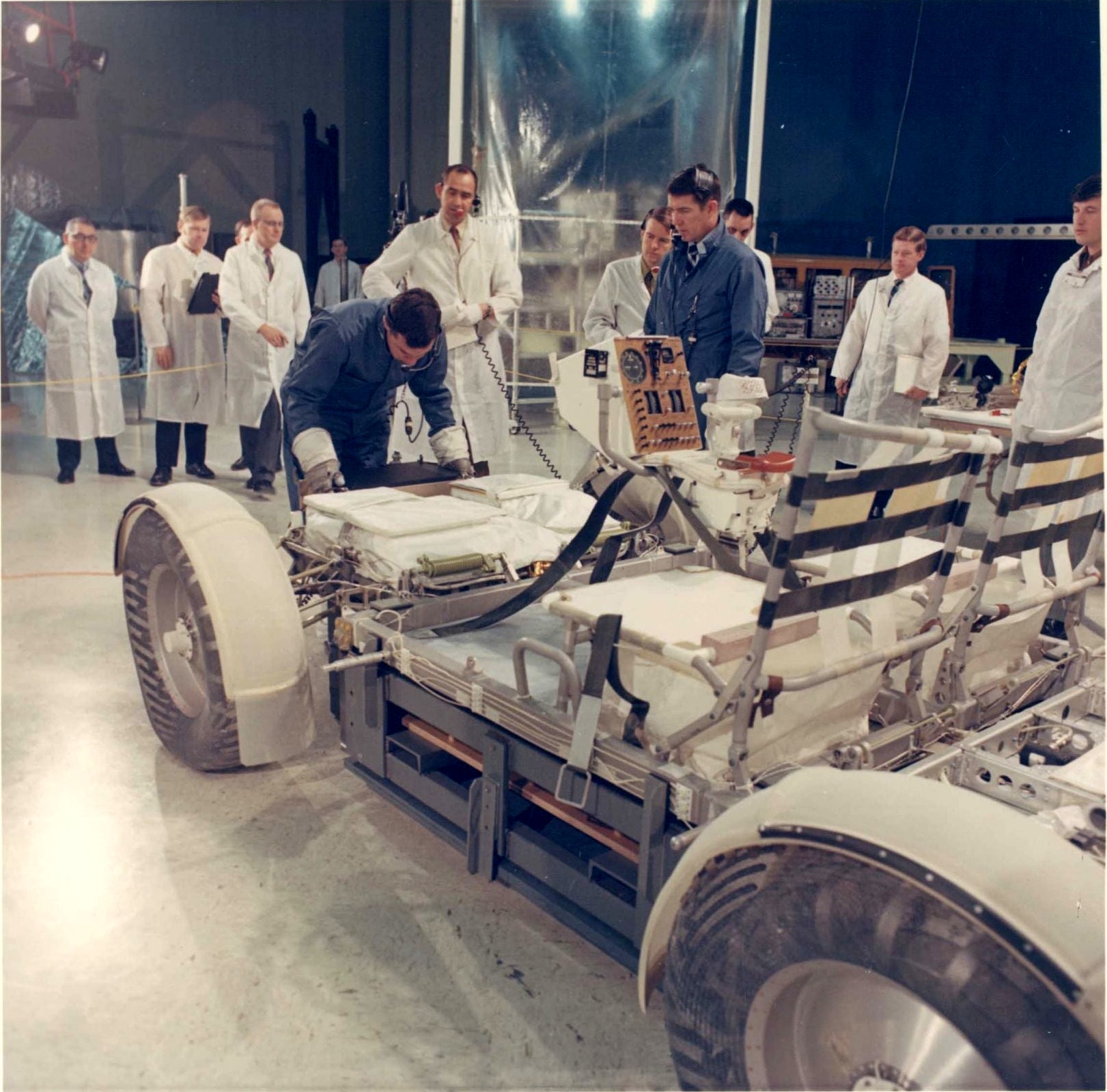
La conception est réalisée par Boeing Compagnie Space Center à Seattle et l' infrastructure à Huntsville. L'assemblage final et le test des véhicules ont lieu au KSC. Février 1971, le premier rover de vol débute 6 semaines de tests d'acceptance chez Boeing et est livré à la NASA le 15 mars pour la mission Apollo 15. Le second modèle de vol est construit à Boeing et testé fin mars puis livré en avril. Le 3e modèle sera livré en mai.
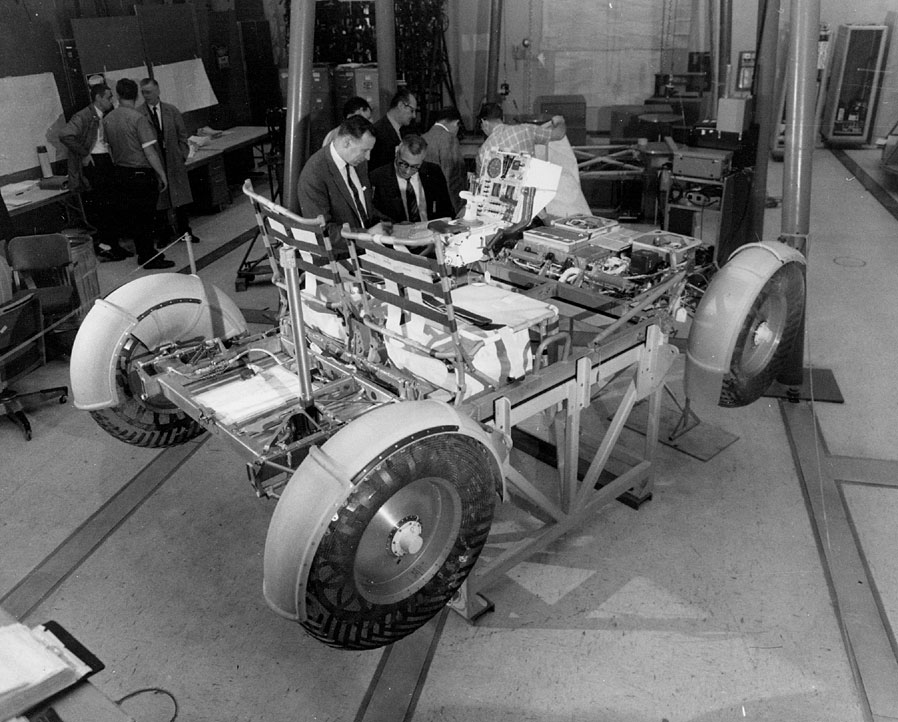
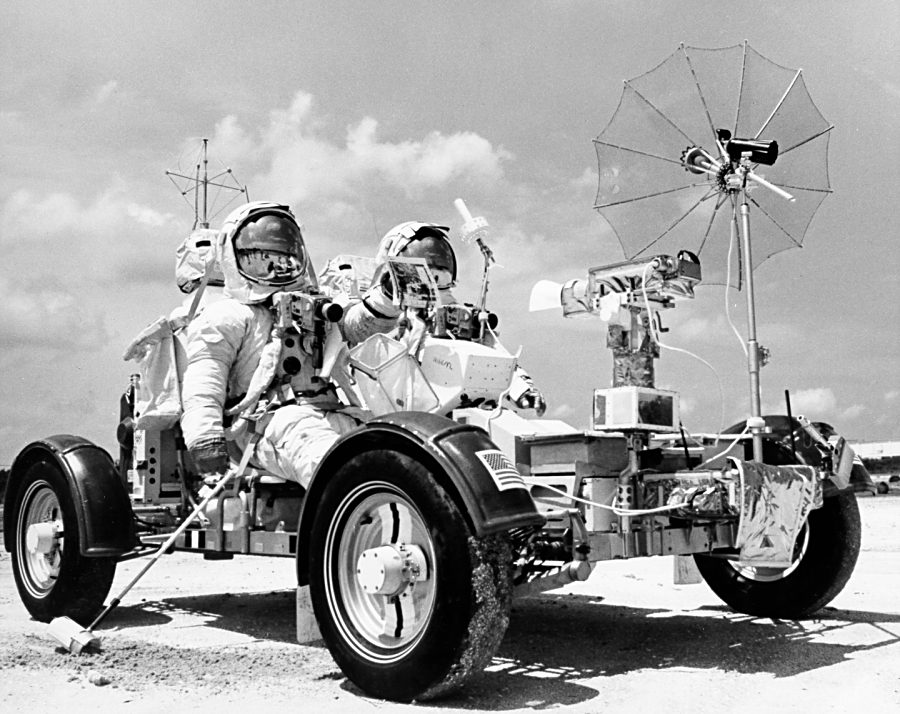
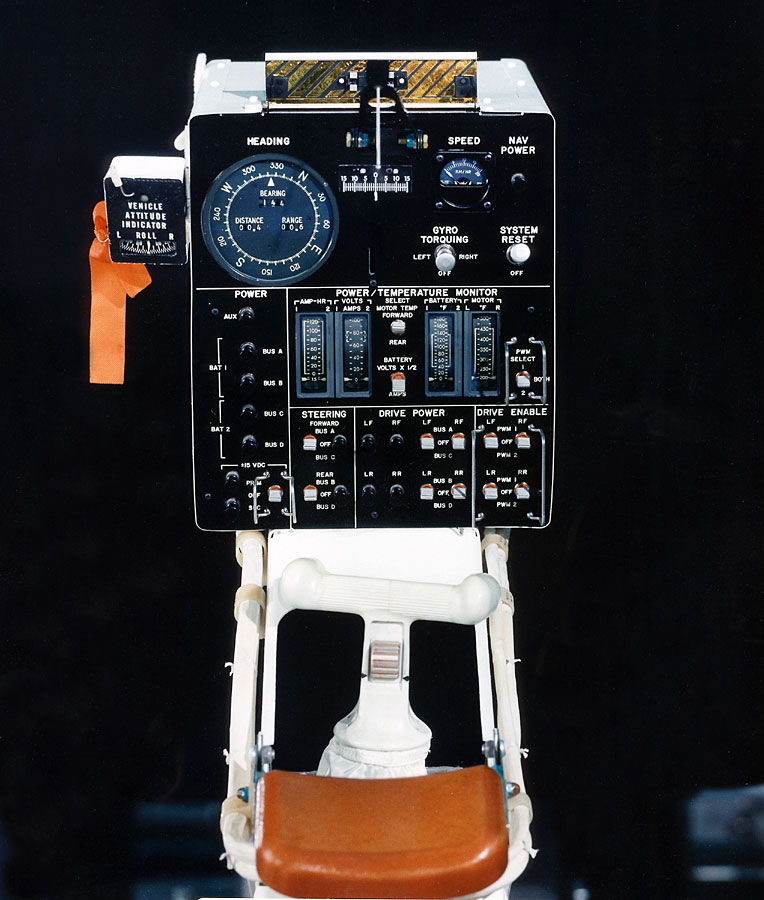
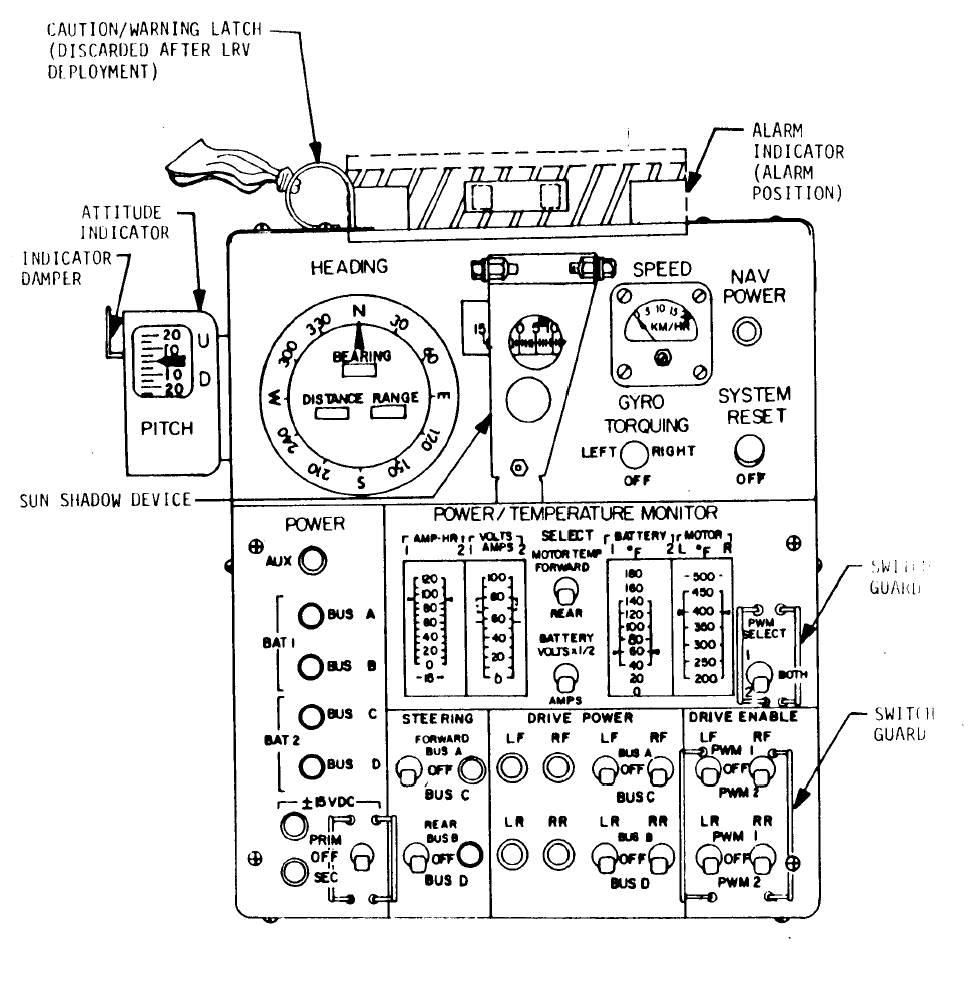
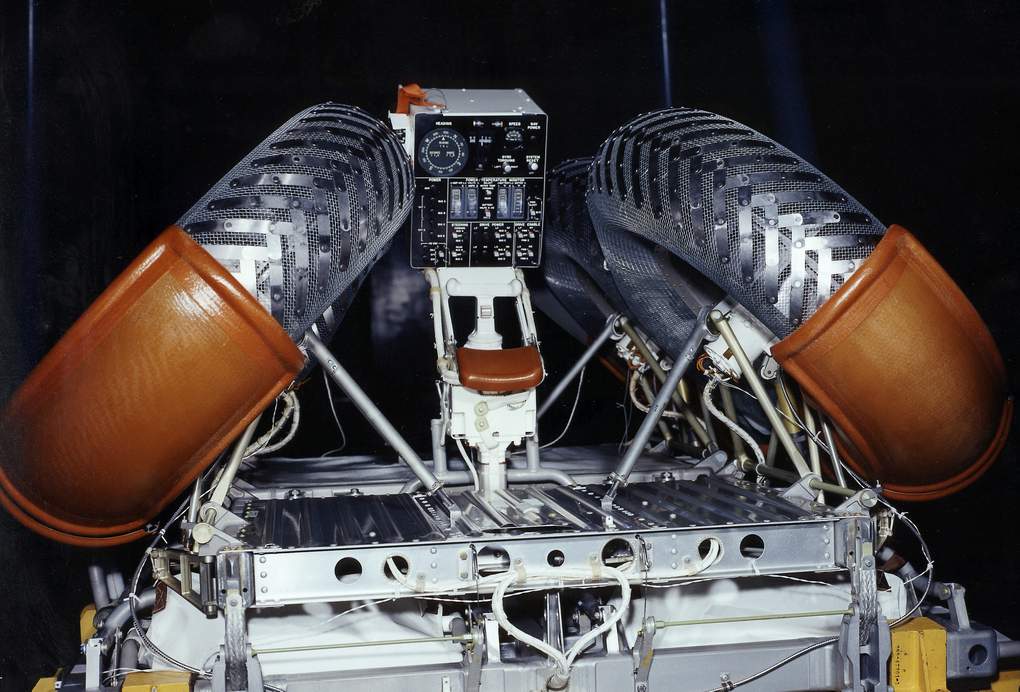
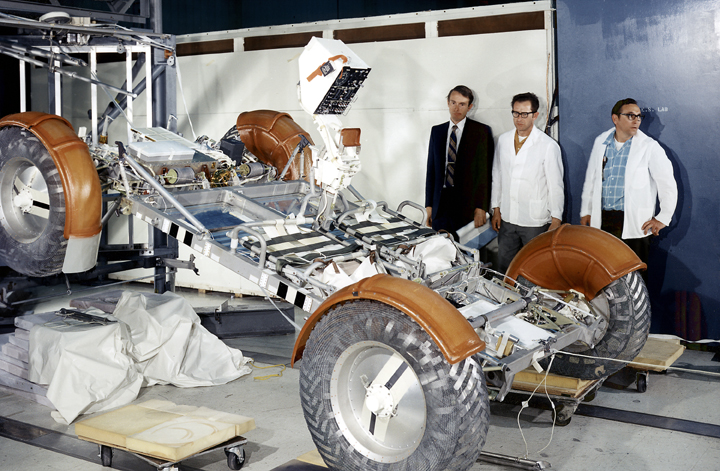
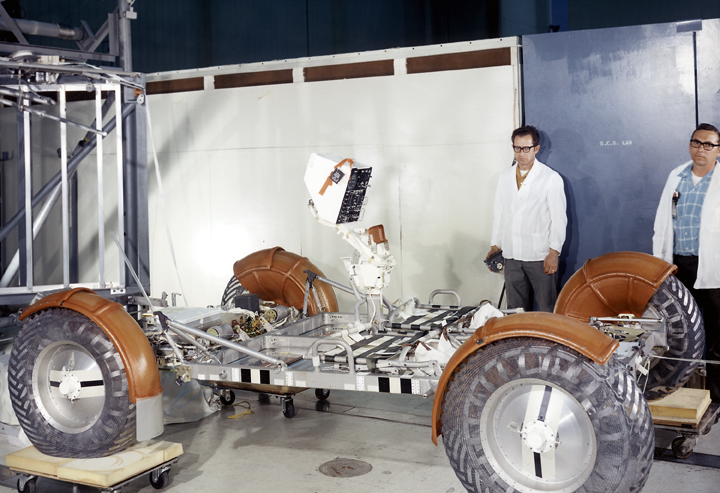
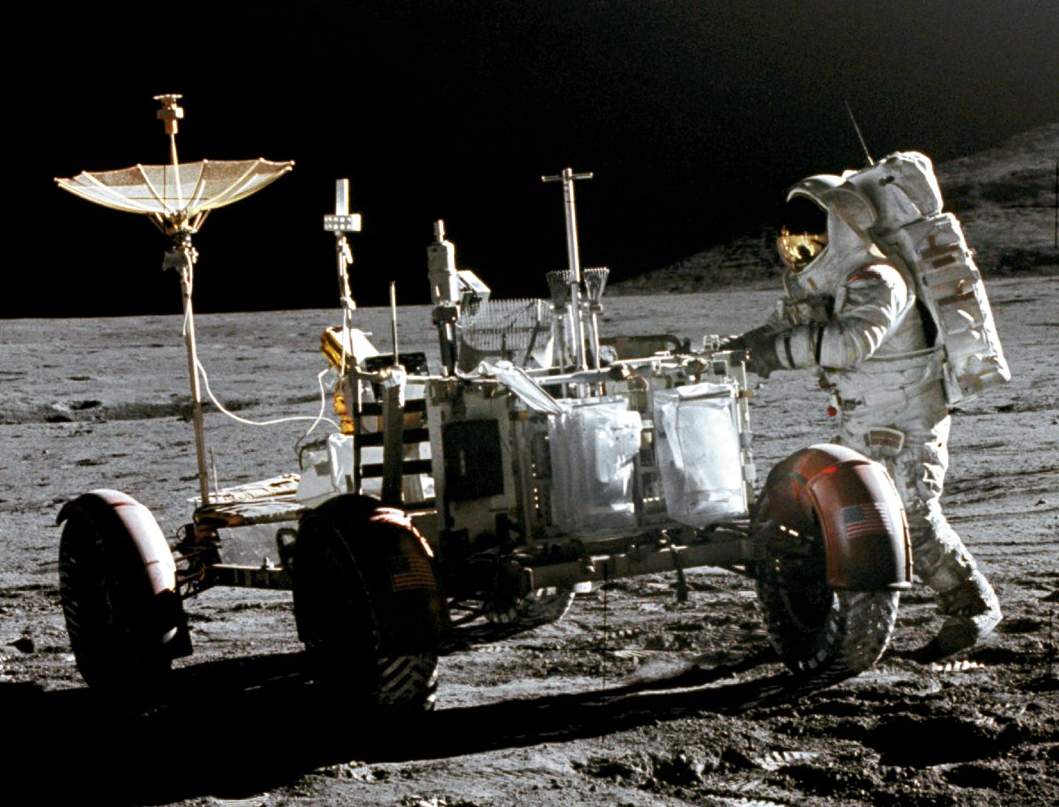
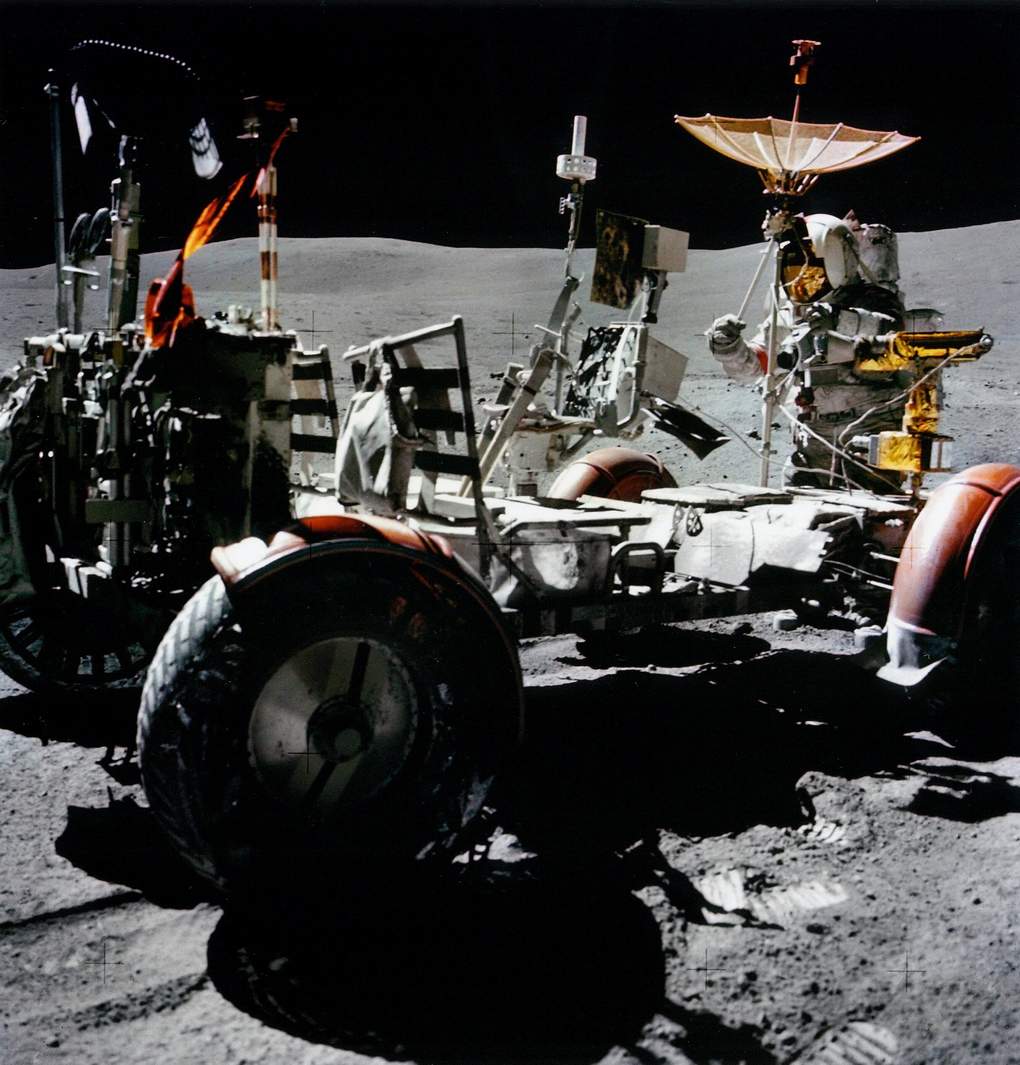
Le Rover est à première vue un véhicule simple, mais en réalité il est complexe, spécialement conçu pour un environnement lunaire (température et relief). En cas d' incident, il doit être capable de se déplacer grâce à ses roues. Les 209,6 kg du Rover sont prévus pour le transport de 2 astronautes avec leur équipement de survie, du matériel scientifique et les pierres récoltées lors des excursions. Le conducteur qui dirige le Rover doit avoir un bon contrôle des commandes, situé sur un pupitre central au milieu du véhicule, au cas où les roues s'enfonceraient par exemple. L' engin peut avancer ou reculé à toutes les vitesses. Le Rover peut ainsi charger 475 kg, dont 363 pour les astronautes en "tenue", 59 kg d' équipements scientifiques et photographiques et 32 kg de pierres lunaires. Le Rover mesure 3,1 m de log, 1,83 m de coté et 1,14 m de haut des roues à l'antenne haut gain, les dimensions d'une coccinelle de Volkwagen. Le chasis est en trois parties et pliable. La partie centrale supporte les deux sièges du type "chaise pliante pour pique-nique", la poigné centrale de commande et le tableau de bord qui se plie aussi. La partie avant supporte les batteries, le système de communication et de navigation ainsi que l'électronique de bord. Sur la partie arrière, prend place tout ce qui sur Apollo 14 était dans la brouette, les outils, les sacs à échantillons. La partie avant et arrière se replie sur la partie centrale.
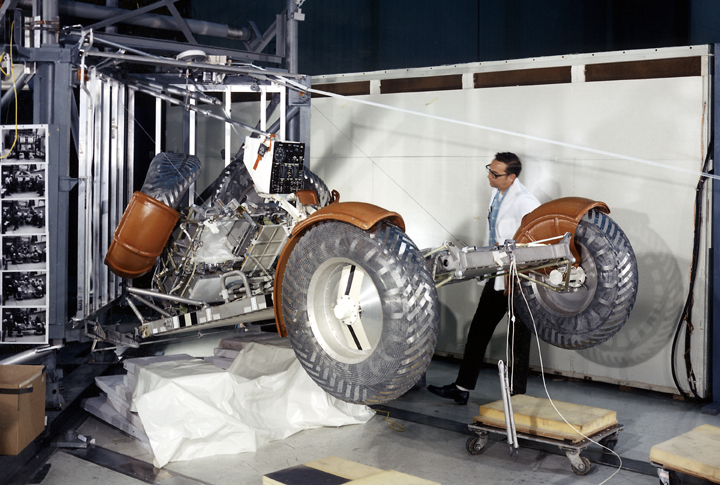
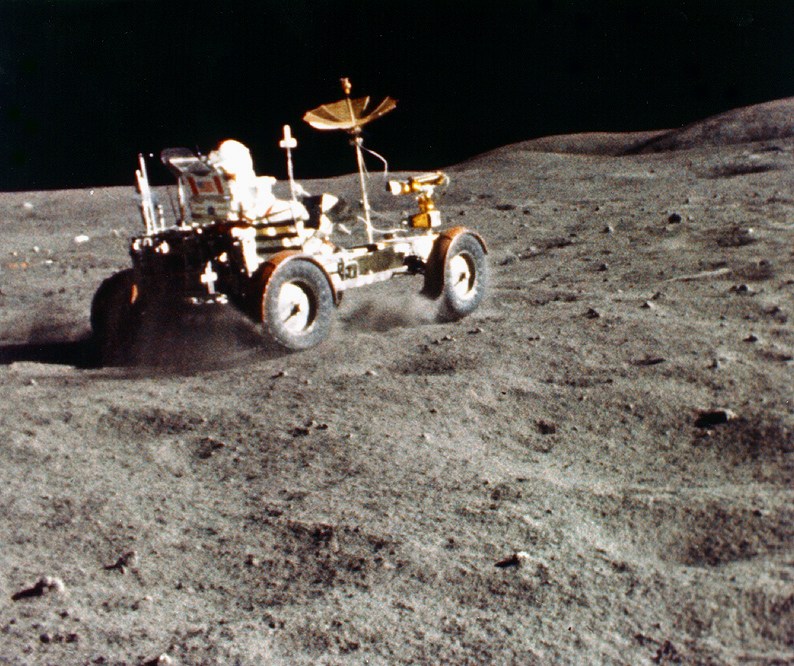
Les 4 roues sont actionnées individuellement par 4 moteurs électriques noyés dans le moyeu, ce qui permet une meilleure autonomie et une maniabilité accrue. Chaque moteur d'une puissance de 1/10 de CV tourne à 5500 tours-minute. Un réducteur permet d'abaisser la vitesse de 257-1. La rotation totale des roues demande 6 secondes. Le rayon de braquage n'est que de 3,1 m. Les roues arrière braquent en même temps de celle de devant mais dans le sens contraire. Cela aurait été impossible à atteindre avec un procédé conventionnel pour un poids équivalent, avec les matériaux disponibles à l'époque. Le système de propulsion date, pour la petite histoire de la fin du siècle dernier. Ferdinand Porsche, géniteur du principe travaillait à l'époque pour la firme auto austro-hongrois Lohner. Le Rover peut rouler à une vitesse moyenne de 10-12 km-h avec des pointes à 16-19 km/h sur la lune. Avec un empattement de 2,29 m, il peut franchir des obstacles de 30, 5 cm de haut, des crevasses de 71, 1 cm avec toutes les roues en contact sur le sol. Il peut monter et descendre des pentes de 25°, et même s' arrêter sur des versants de 35°. Le Rover a un dégagement au sol de 35,6 cm. C' est à Delco Electronic que l' on doit la conception des roues, des suspensions et du système de conduite du Rover.
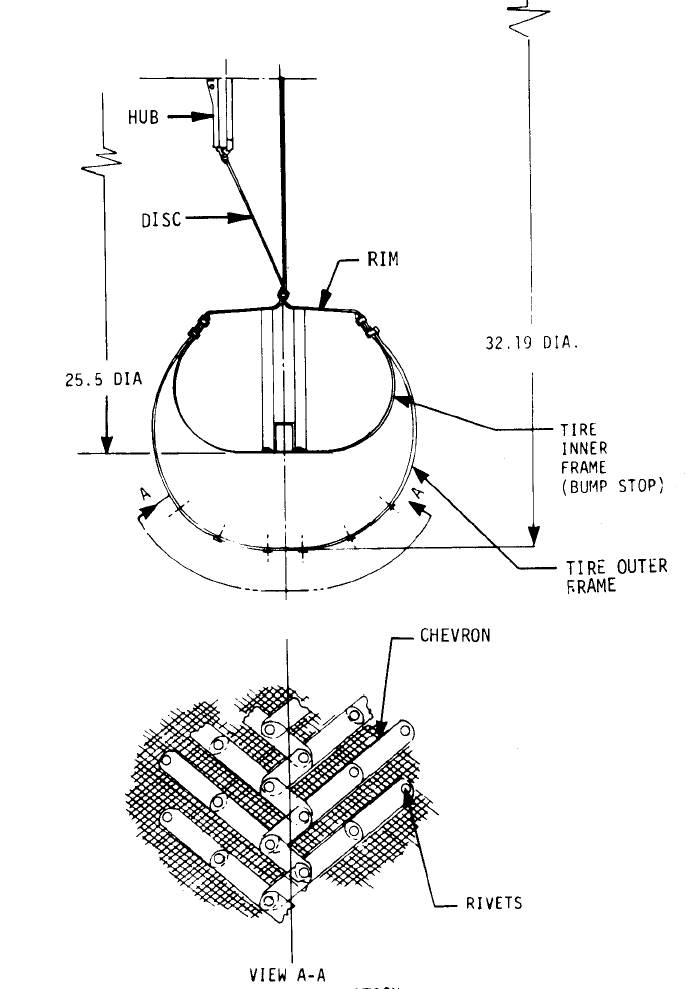
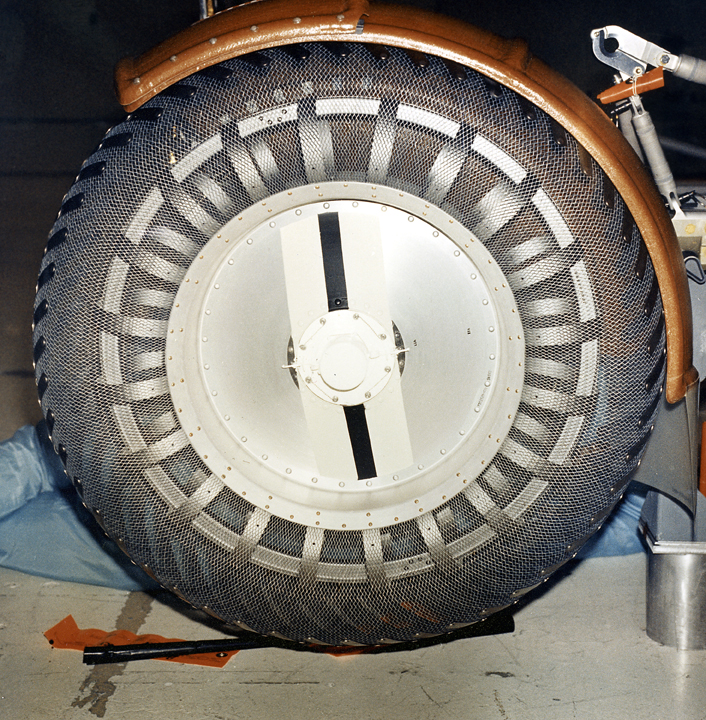
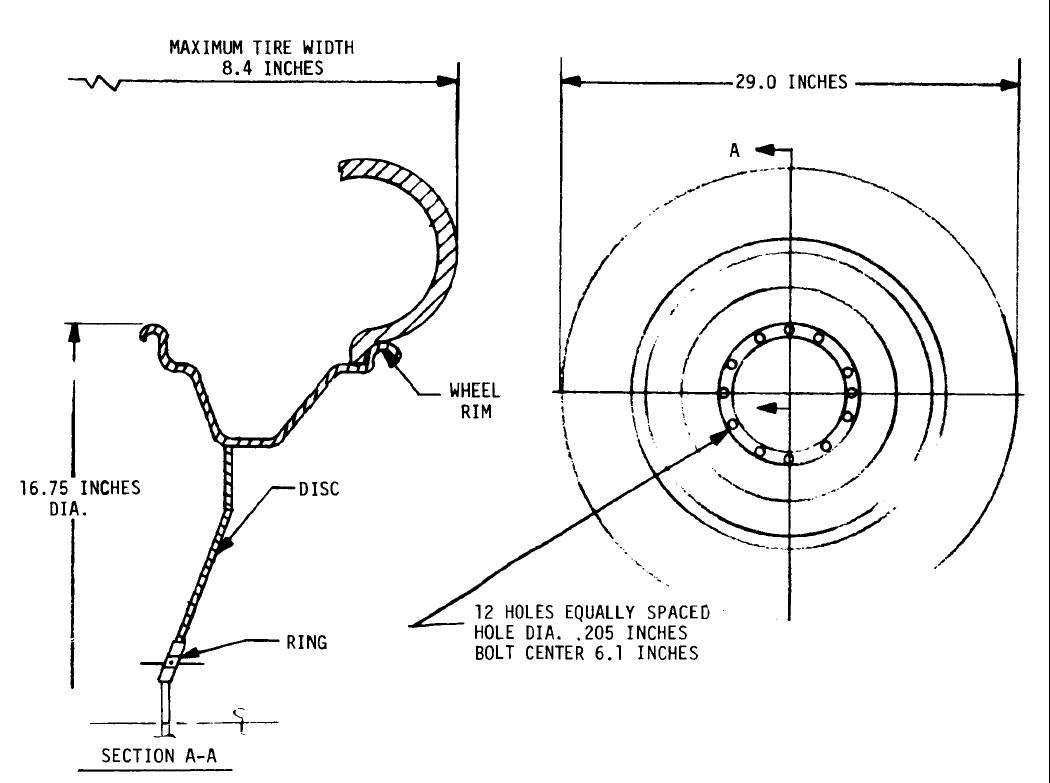
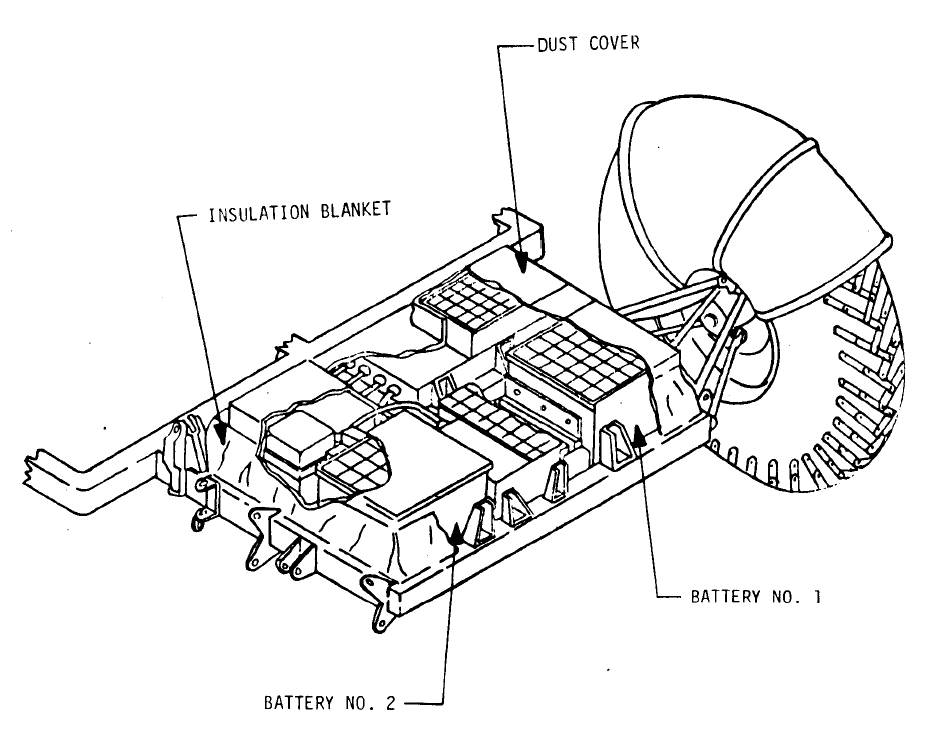
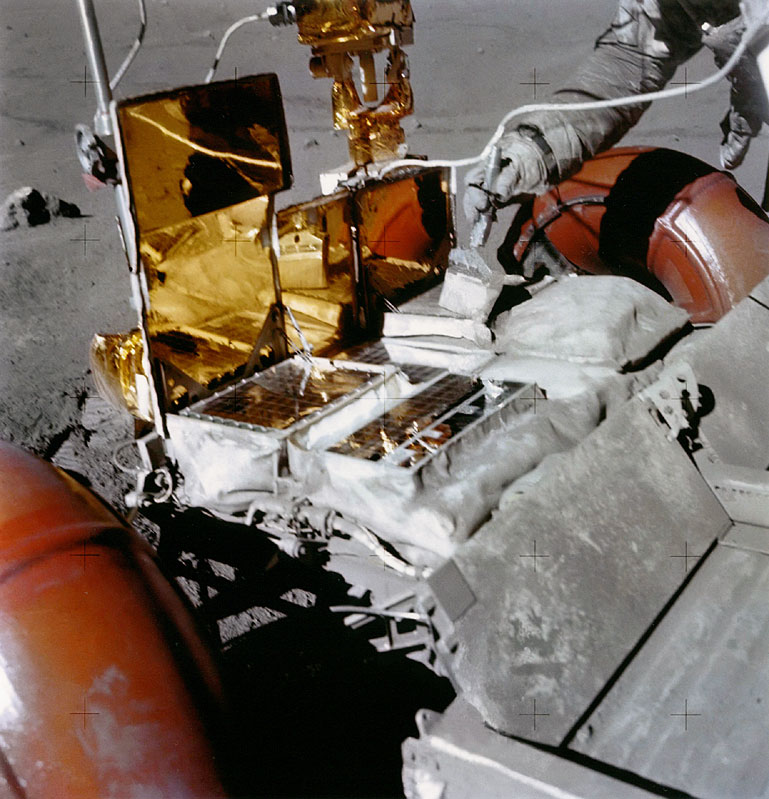
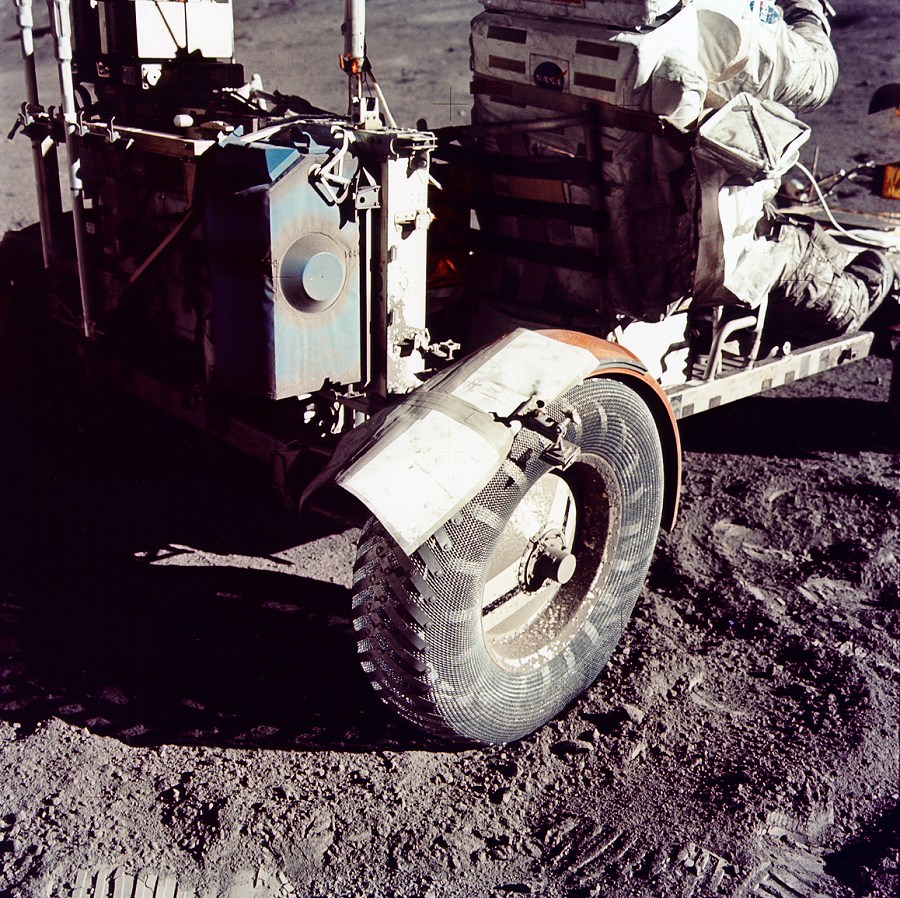
Les roues du Rover, 85 000 $ pièce. La conception du Rover était t'elle que les empreintes de ces roues étaient moins visibles que celles des bottes des astronautes. Les roues ne sont pas gonflées contrairement aux roues de la brouette d'Apollo 14. Goodyear avait développé ses deux roues gonflés avec beaucoup de soucis. C'est à plat que partait les pneus de cette brouette. Dans le vide, le peu d'air présent le gonflait à sa taille normale. Sur la lune, malgré la faible pression de l'air, la brouette avait tendance à rebondir. Pour le rover, le système de suspension très élaboré permettait d'absorber les petites et grandes bosses du relief lunaire. Les roues du rover sont faites d'un treillis métallique constitué de 800 brins de fils d'acier zingué, long de 81 cm, épais de 0,08 mm, ondulé à intervalles de 0,47 cm tissés à la main selon un gabarit spécial, puis attachés à un moyeux central en aluminium. Des bandes de titane en chevrons étaient rivetées par dessus assurant une meilleure adhérence. Chaque fils d'acier est minutieusement radiographié pour éviter les defauts. La roue pouvait se déformer facilement autour de petits obstacles pour donner une conduite plus souple. A l'intérieur du "pneu", visibles à l'intérieur des mailles se trouvait un petit "pneu" appelé "Bump-stop", maintenu à la roue par des sangles flexibles destiné à absorber les impacts contre les gros rochers. La masse de la roue, 5 kg sur terre était de 900 grammes sur le lune. Un des problèmes avec ces roues en treillis métallique, la poussière qui rentrait dedans et était projeté sur les astronautes lors des déplacements. Des garde boues ont été rajoutés et les astronautes équipés de brosse pour se nettoyer et nettoyer l'électronique de bord dont les les radiateurs de dissipation de chaleur. Un amortisseur ultra-léger, soutenu par des anneaux en titane, est relié au voile, assurant un appui supplémentaire à la roue et limitant son fléchissement lorsque elle heurte un obstacle. Le Rover prend son énergie électrique de 2 batteries zinc argent de 36 Volt. Elles sont construites par Eagles Picher Industrie, Electronic Division à Joplein dans le Missouri. Elles ne sont pas rechargeables, elles sont faites d' un monobloc de plexiglas avec 25 cellules (hydroxyde de potasse comme électrolyte). Leur capacité est de 121 A/h et sont logées à l'avant du véhicule dans des cases en magnésium. Les instruments concernant l'affichage, la capacité, la puissance sont fournis par Curtis Instruments Inc, à Mount Kisto, dans l'état de New York. Une seule batterie peut néanmoins assurer toute la puissance de l'engin.
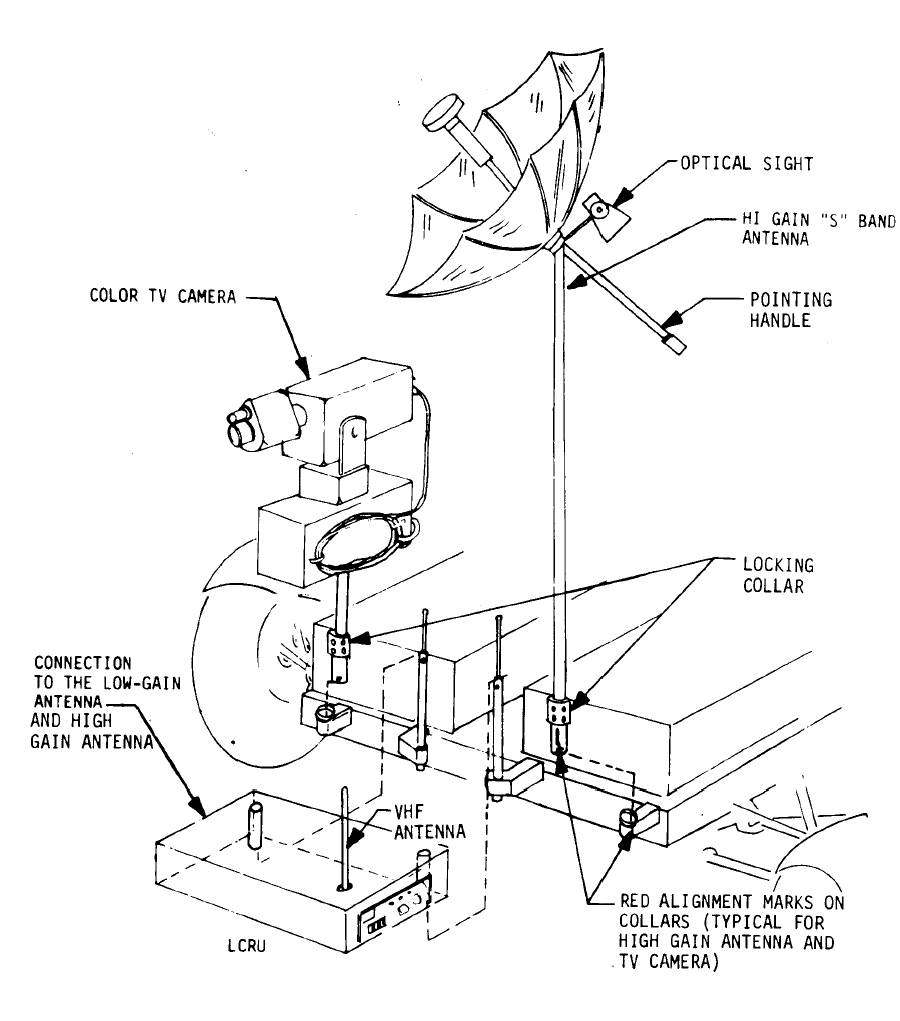
Le Rover est prévu pour fonctionner dans des écarts de températures très précis. Au lancement, tolérance de 27 à 38°C, des couches isolantes contrôlent la chaleur durant l'ascension, l'orbite d'attente autour de la terre, le trajet lunaire, l'orbite lunaire et la descente sur la lune. Les batteries ont une tolérance de -16 à +102°C . Sur la lune, le contrôle thermique est semi passif utilisant le châssis comme radiateurs, grâce à des surfaces réfléchissantes, des miroirs thermiques, des sangles, des fusibles et des surfaces spécialement traitées. La protection passive est assurée par des couches de mylar aluminisé, du nylon et de la glace polie. La chaleur des batteries étant dissipée par des radiateurs. Le Rover est équipé d'
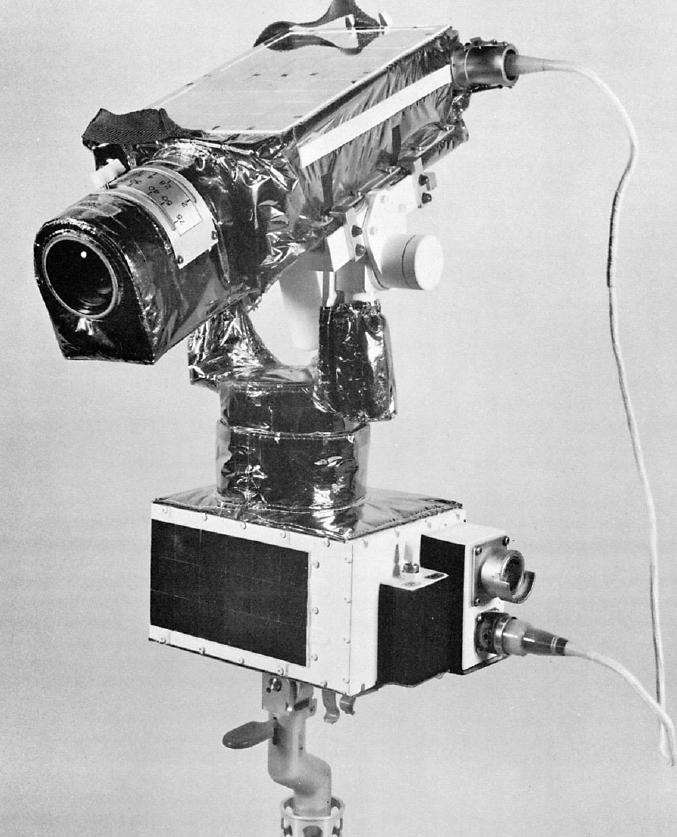
une caméra TV télécommandée depuis Houston. La caméra sera
télécommandé depuis le MCC par Ed Fendel pour filmer le départ des
astronautes de la lune. L'autonomie de la caméra étant assujétie aux
batteries du Rover (78 à 80 heures), elle sert sur Apollo 15 à filmer un
dernier panorama du site le 4 août. Malheureusement le 6 pour filmer une
éclipse, la caméra s'éteint définitivement à la 4eme opération. Pour
Apollo 16, la caméra n'est plus utiliser après le décollage du LM. Pour la
dernière mission, la caméra du Rover est utilisée pour filmer les
détonations des explosifs laissés sur la lune par Cernan et Schmitt. Les
essais pour tenter d'observer la retombée de l'étage de monté du LM sont
restés vain.
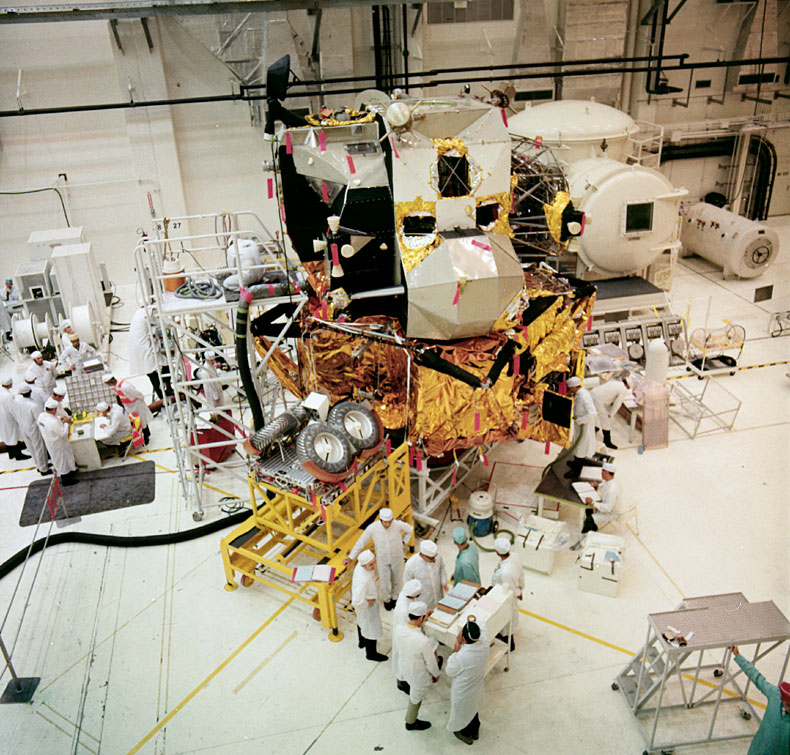
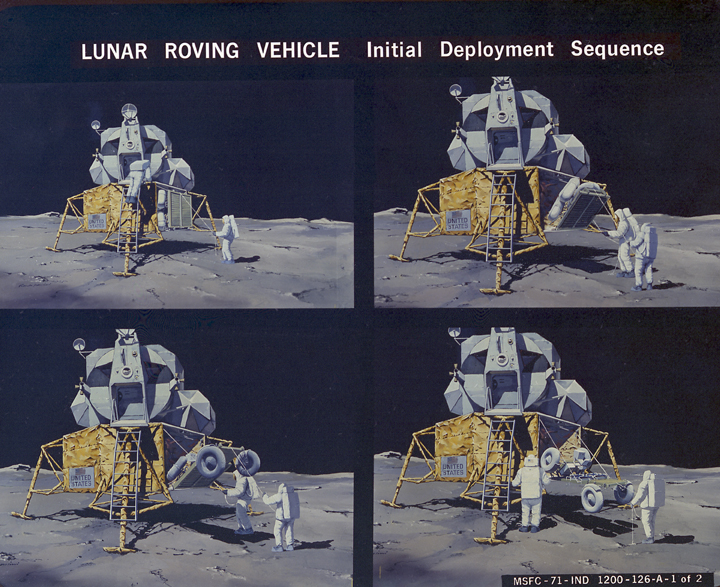
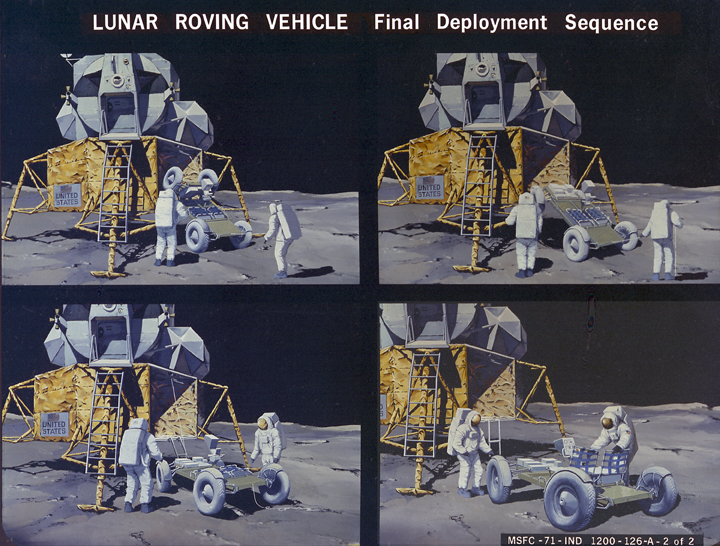
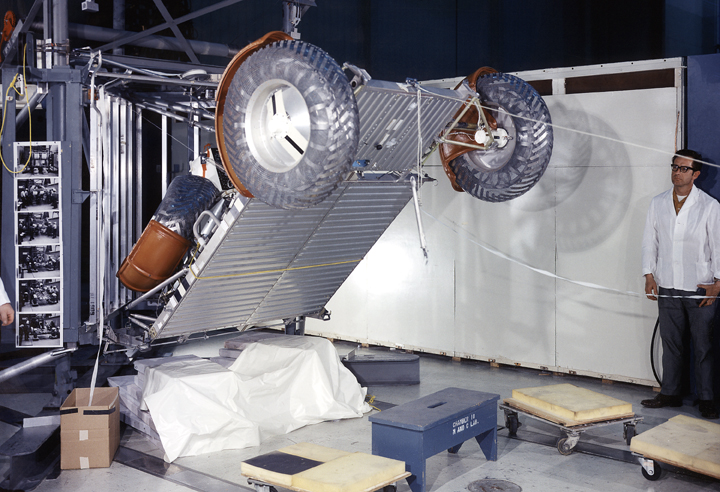
STOCKAGE ET DÉPLOIEMENT Le Rover est conçue pour être emporté replié dans un des quadrant du LM. Construit autour de ferrures et articulation, il peut être déplié par un seul astronautes grâce à un système de poulie. Le Rover peut opérer 78 heures durant le jour lunaire, son rayon d'action étant limité à 9, 5km à cause de l' autonomie des PLSS. Au total, les 3 Rover ont parcouru prés de 65 km sur la lune.
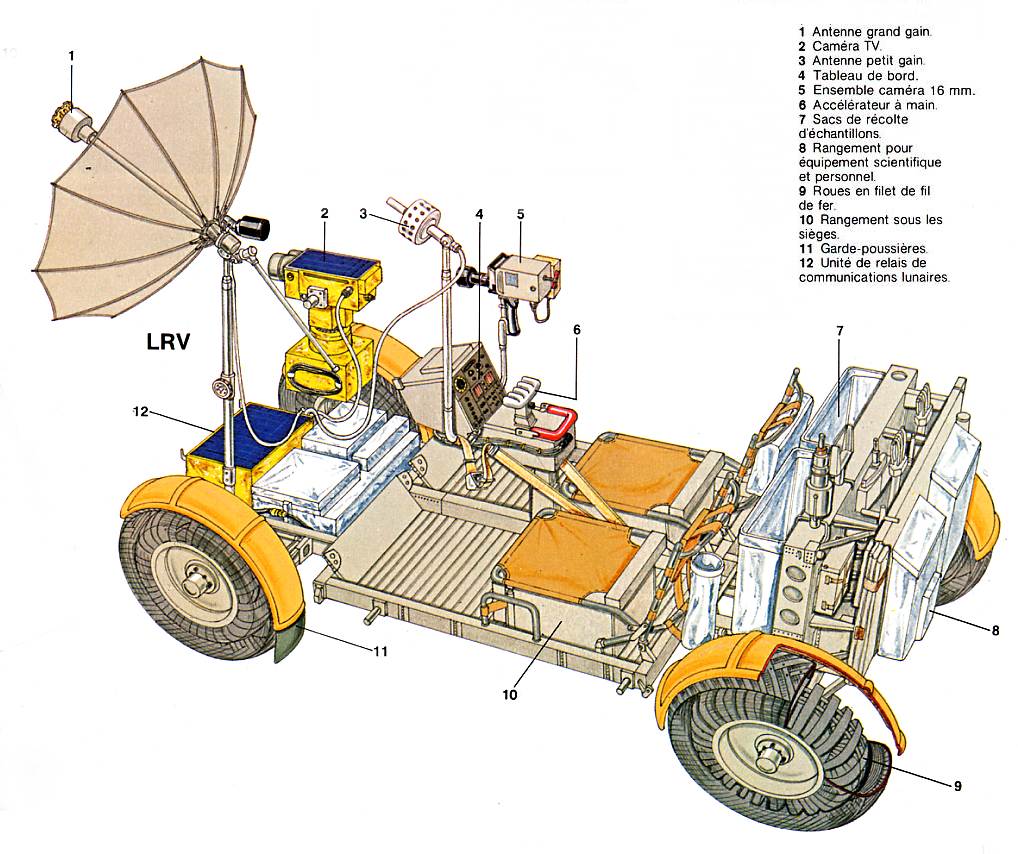
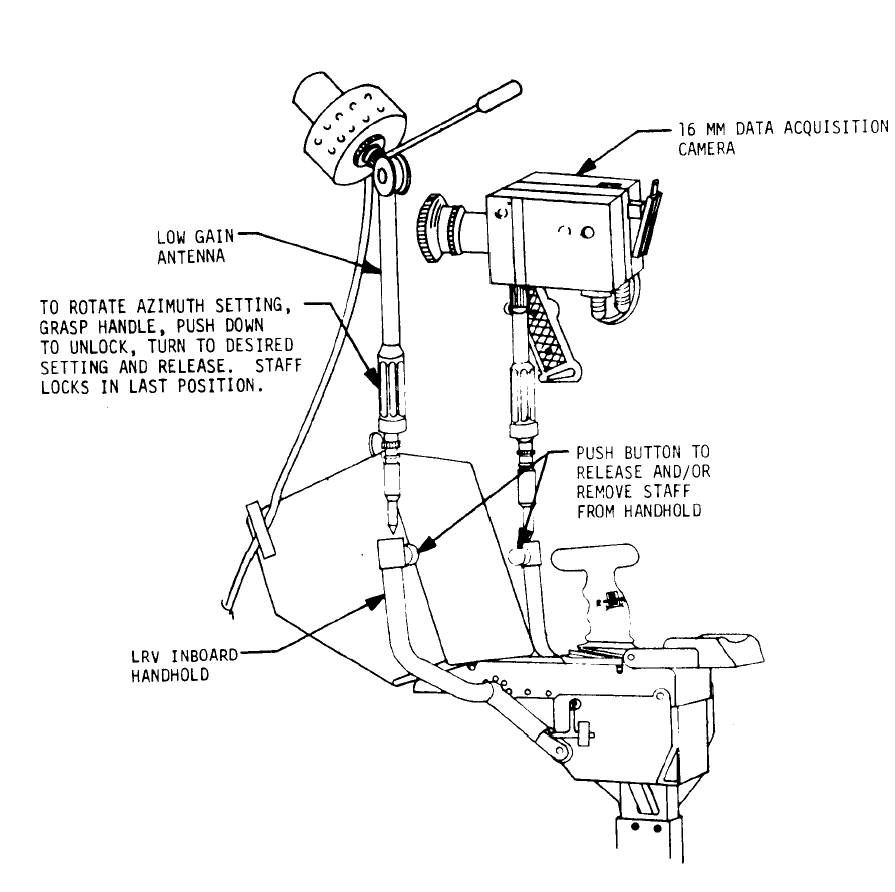
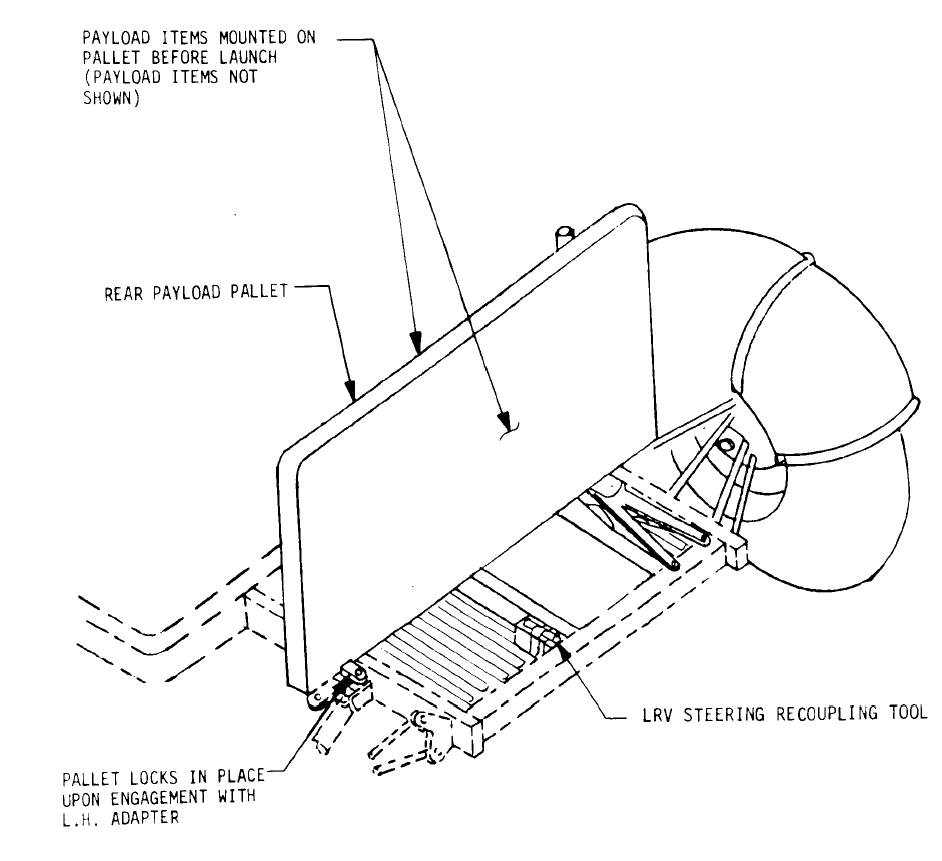
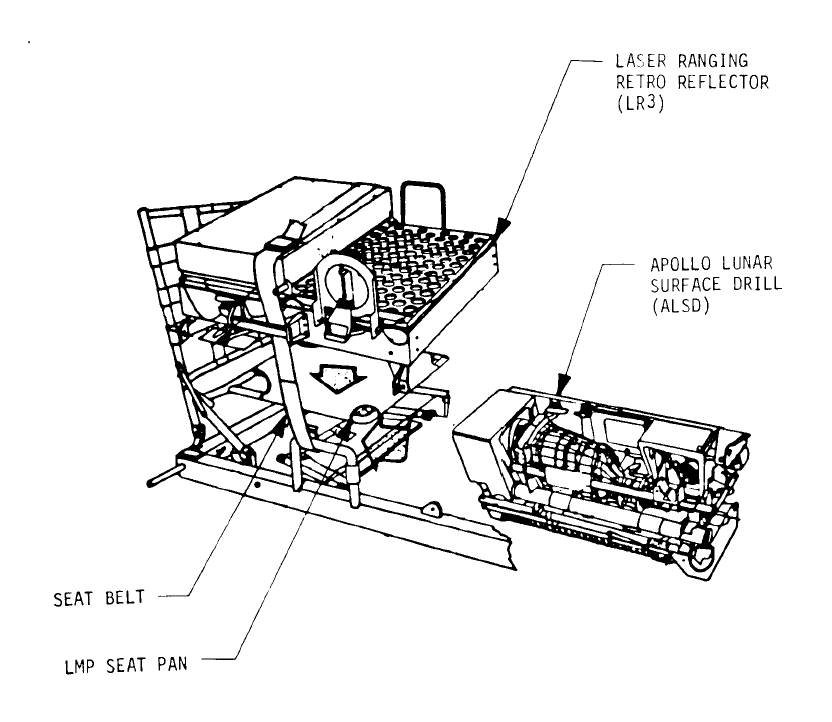
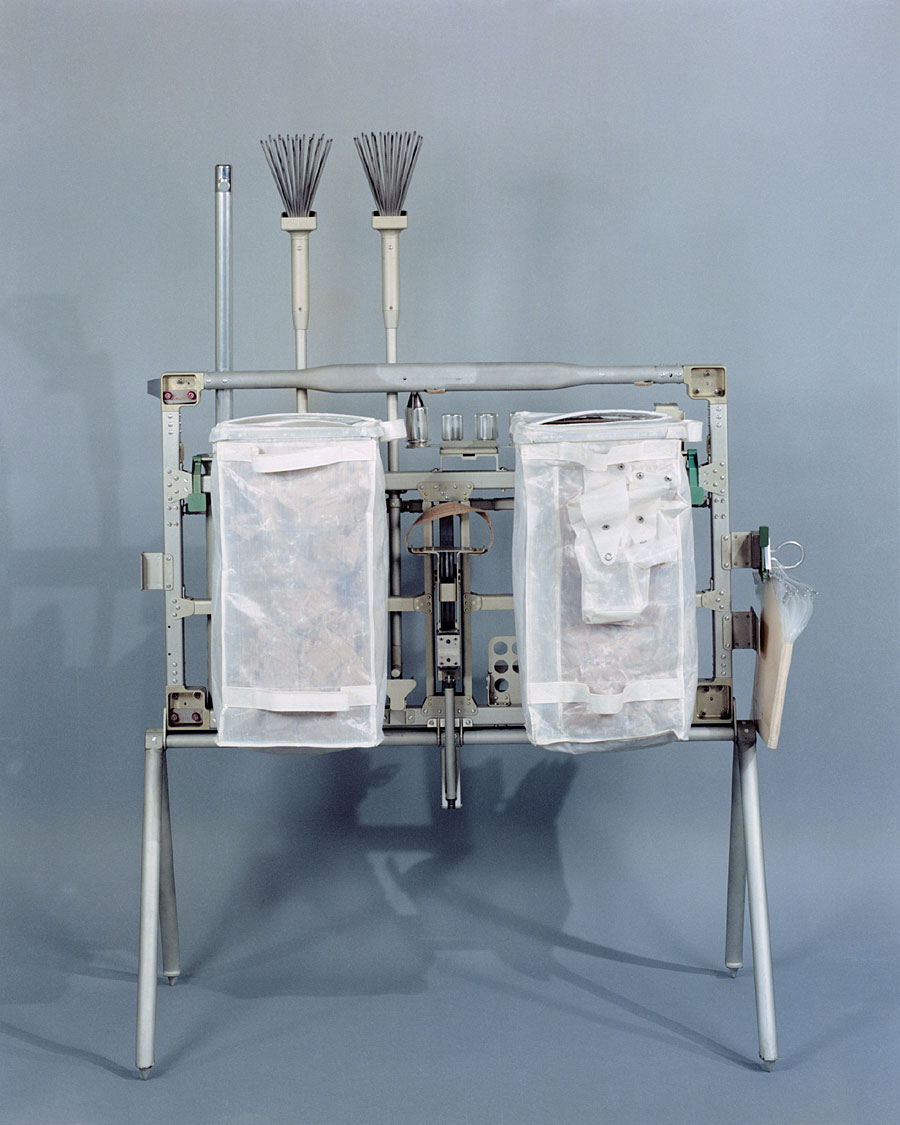
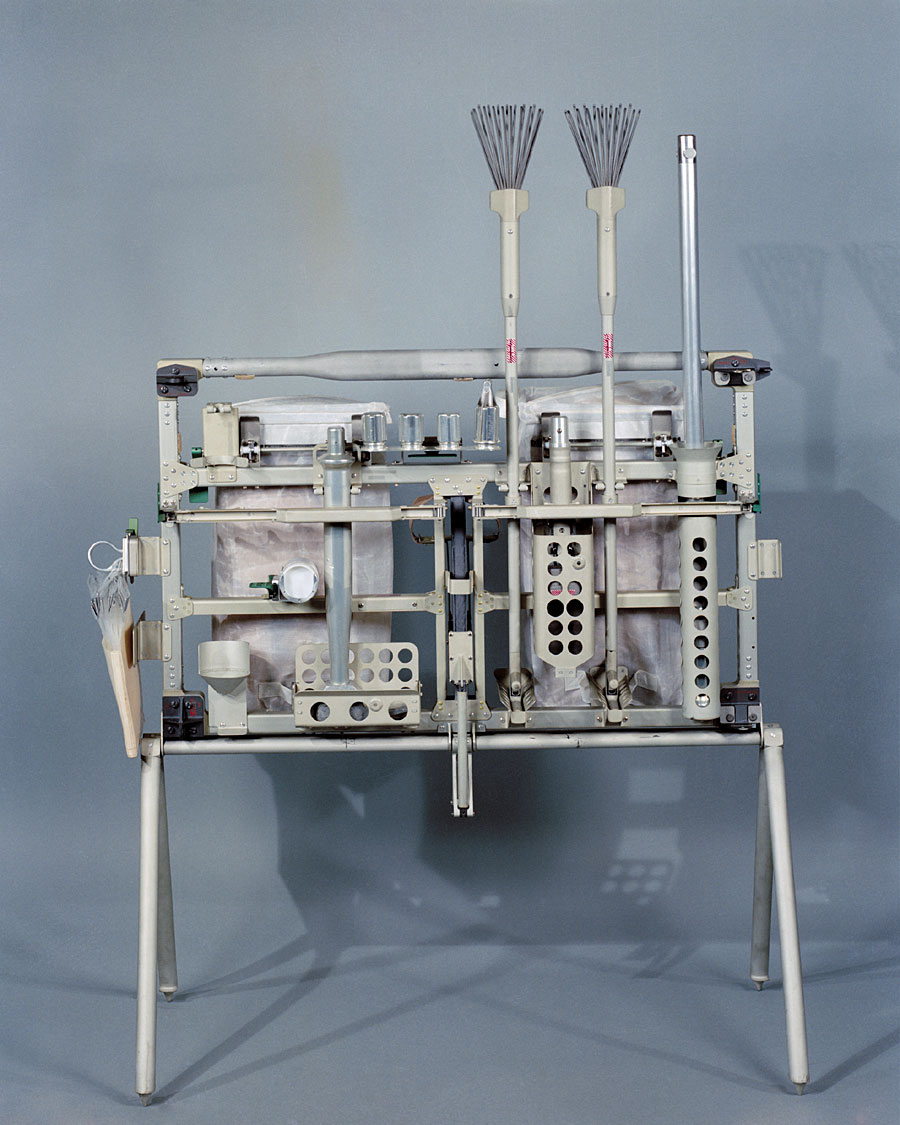
Le Rover ne sert pas uniquement à augmenter le rayon d'action des astronautes sur la lune mais doit aussi transporter le matériel (pelle, marteaux, balai, pinces) et les échantillons récoltés pendant les EVA. De nombreuses rangements ont été aménagé dans le Rover pour remplir cette mission. Ainsi la structure du châssis arrière a été aménagé pour recevoir la pelle et la foreuse ainsi que les échantillons de pierre dans des sacs attachés sur un arceau rabattable. La boite à outil prend place aussi à l'arrière. Le dossier des fauteuils permet de mettre un sac en bandouillère et l'avant de la console principale supportent la caméra et l'antenne faible gain. Le châssis avant lui loge l'antenne grand gain parapluie et la caméra TV commandée par houston. Des sacs à échantillons sont logés sous les sièges des astronautes ainsi que la brosse à poussière.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||



%20Bendix%20Corporation.jpg)
%20Bendix%20Corporation%2002.jpg)
%20Bendix%20Corporation%2003.jpg)