|
|
LE
DOCKING MODULE Octobre
1970, des représentants de la NASA se rendent à Moscou à la Cité des étoiles.
Là, ils peuvent pour la première fois voir les simulateurs du vaisseau soviétique
Soyouz. Leur étonnement est grand quand à la petitesse du vaisseau ! LE
SOYOUZ, CET INCONU Ce Soyouz, les américains et le reste du
monde le connaissent très mal. Son premier vol en avril 1967 se termine
tragiquement avec la mort de son occupant au retour sur terre. Après plus
d’un an d’interruption, Soyouz 2 inhabité et Soyouz 3 habité simule un
amarrage entre les deux vaisseaux. Il sera réalisé en janvier 1969 entre
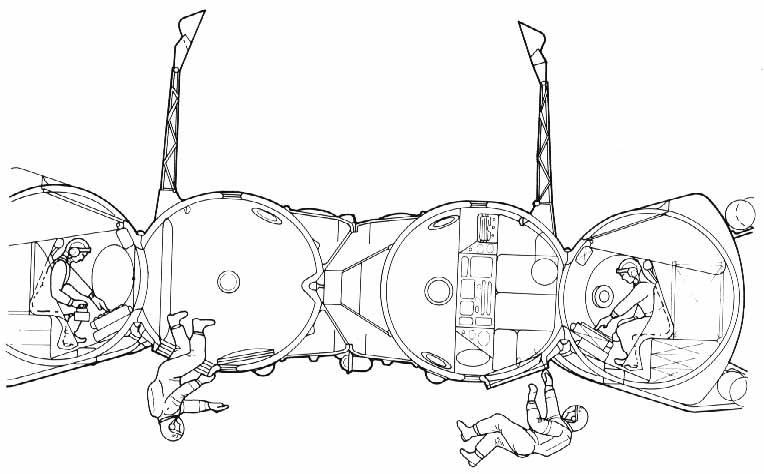
Soyouz 4 et 5. Une sortie dans l’espace permet aux cosmonautes de passer
d’un vaisseau à l’autre. Contrairement à Apollo, le système d’amarrage
du Soyouz ne permet pas le passage intérieur d’un homme entre les deux
vaisseaux. Il est en étude selon les responsables russes pour pouvoir
d’amarrer aux futures stations orbitales. Pour leur opérations lunaires, un
cosmonaute devra sortir du Soyouz Zond et rejoindre le module lunaire par
l’espace. Une autre manœuvre de rendez vous dans l’espace est réalisée
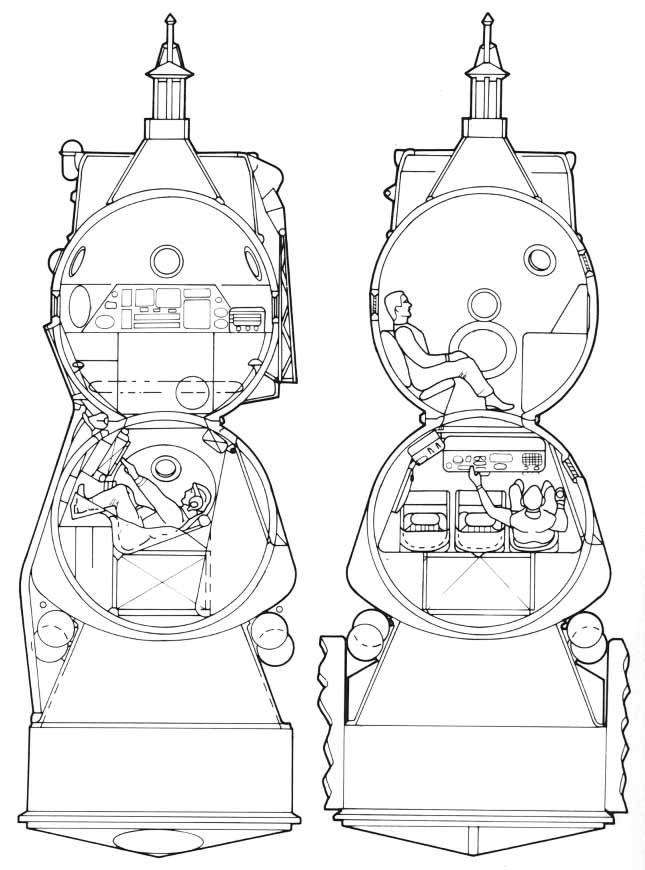
(sans succès) en octobre avec cette fois ci trois Soyouz habités. D’une masse voisine de 7 tonnes, c’est un vaisseau triplace constitué de trois modules. Le premier à l’arrière, cylindrique abrite les moteurs, les panneaux solaires, l’énergie de bord et le contrôle d’attitude. La cabine au milieu en forme de cloche sert au lancement et au retour. Sa base recouvert de matériaux ablatif permet la traversée de l’atmosphère. Un système de parachute assure le retour au sol. Devant, se trouve le module orbital, cylindrique, le lieu de vie en orbite. Il communique avec la cabine par un sas de 80 cm d’ouverture. Contrairement à Apollo, les occupants du Soyouz n’ont pas de vue directe sur l’avant de leur vaisseau, un système de caméra TV leur permet néanmoins de voir dehors.
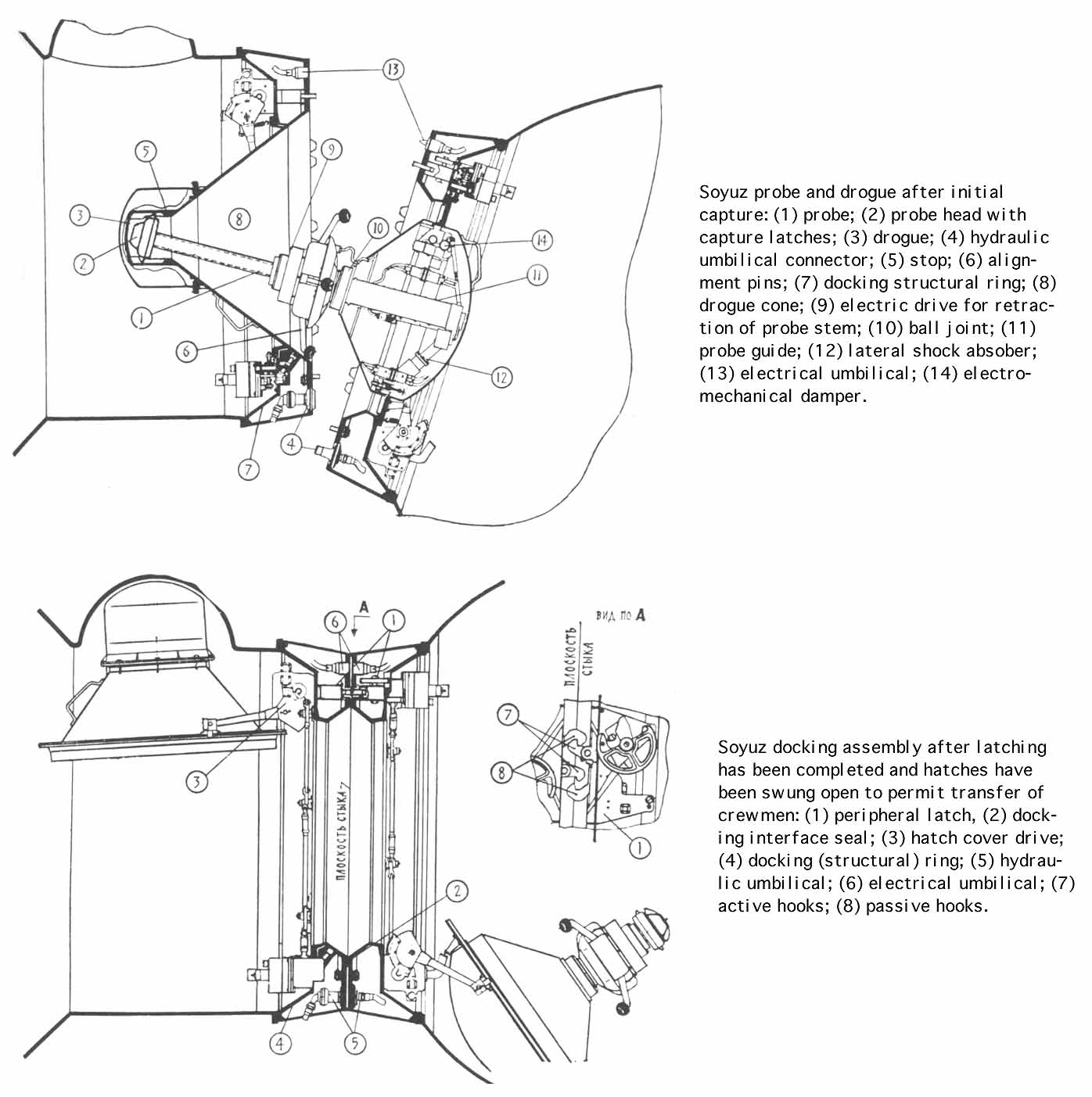
Le système d’amarrage attirent la curiosité
des américains. Il est similaire à celui d’Apollo. Le rendez orbital est réalisé
en trois phases, une manuelle jusqu’à l’orbite d’attente (deux jours de
vol), une automatique pour l’approche à partir de 400 mètres et la jonction
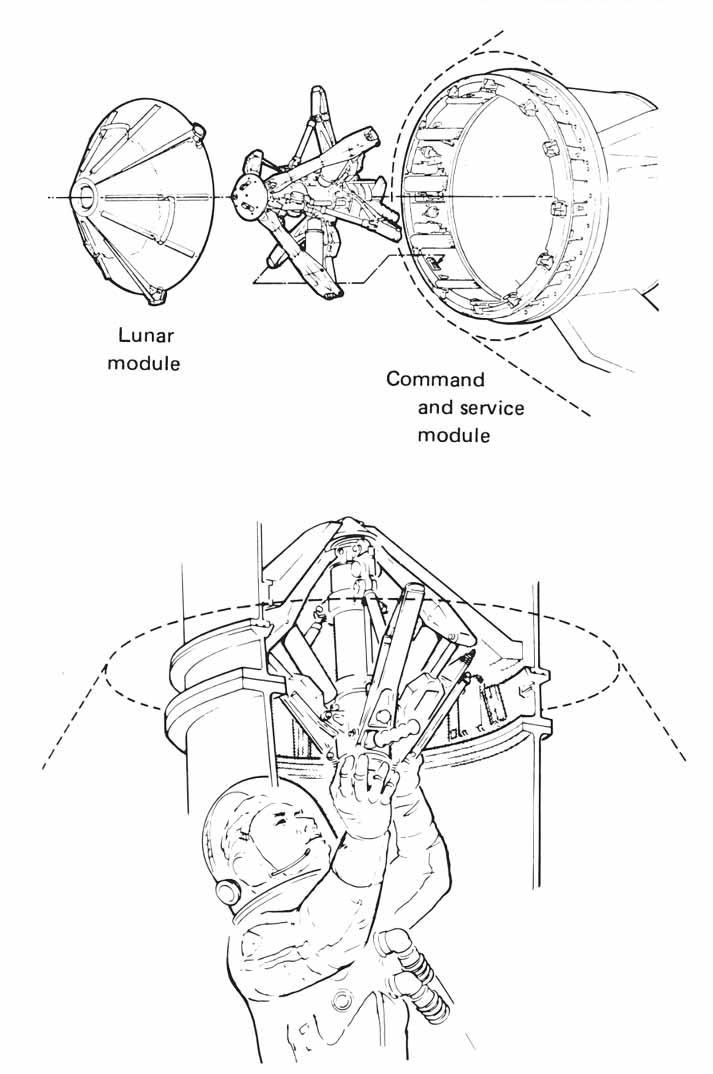
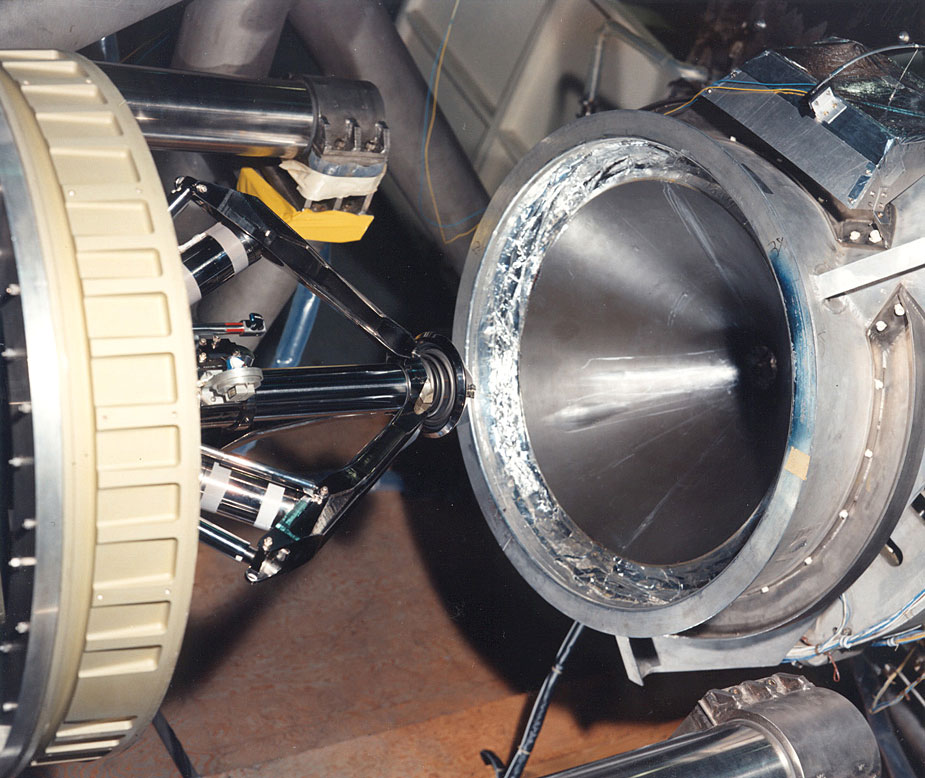
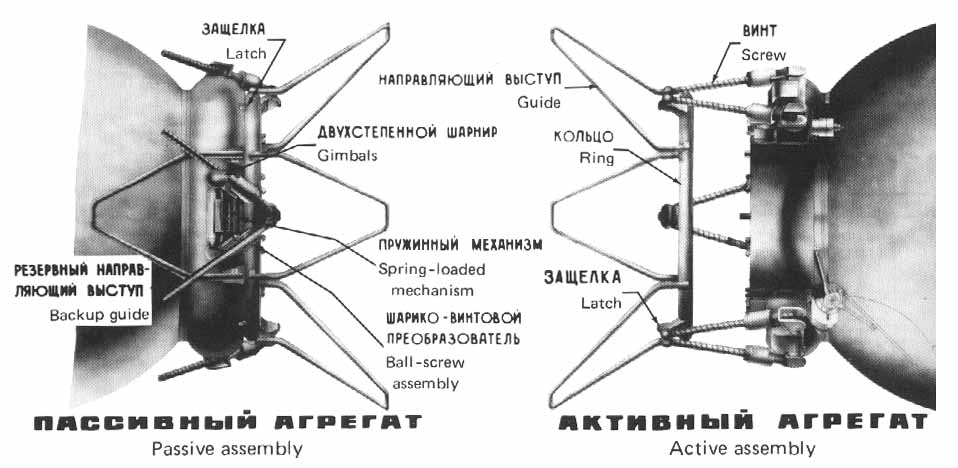
finale en automatique ou manuelle. Comme Apollo, le Soyouz utilise une pièce de
jonction « cône-entonnoir » , à savoir une tige male qui rentre
dans un entonnoir femelle. Mais ce système ne permet pas le transfert d’équipage
par l’intérieur. En fait, il s’avère qu’il a été développé en toute
hâte comme le Soyouz pour gagner la course à la lune. Quand la « capture »
est faite, un moteur électrique rétracte la tige afin d’aligner et
verrouiller la jonction. Sur Apollo, la tige est rétractée par l’action
d’un gaz. Conséquence, le Soyouz peut réalisé plusieurs tentative de
jonction, alors qu’Apollo ne peut en réaliser que quatre, deux principales et
deux en secours. Sur le Soyouz, de petits guides permettent la connection des
différentes prises ombilicales entre les vaisseaux (électricité, pneumatique,
fluides) assurant une jonction plus précise. Le système d’amarrage Apollo
est un système sur déjà éprouvé plusieurs fois depuis Apollo 9. Parmi 7
concepts proposés, il a été préféré au système « anneau-cône »
à amortisseur. En 1967, la NASA avait aussi étudié un concept « androgyne »
pour Skylab permettant la jonction de vaisseau en passif et en actif en toute sécurité.
Le système d' amarrage des vaisseaux Apollo et Soyouz.
Le DS d'Apollo DES
CHOIX DIFFICILE Les travaux vont bon train. Plusieurs
possibilités sont envisagé, un vol Soyouz-Skylab avec réalisation d’expérience
en commun, un vol Soyouz-Skylab avec occupation de la station après le départ
des américains et un vol Apollo-Soyouz. C’est ce dernier qui a la faveur des
américains. Des études sont lancées sur quatre systèmes de jonction, un
double système cône-anneau, une nouvelle pièce de jonction pour les soviétiques,
le montage d’une sonde de type Soyouz sur Apollo et enfin l’utilisation des
sondes équipant les deux vaisseaux originellement. Janvier 1971, la NASA choisit de développer
un module intermédiaire entre les deux vaisseaux dans lequel seront réalisés
des expériences scientifiques. Ce concept est préféré à un amarrage sans
transfert d’équipage, un amarrage avec transfert mais par l’extérieur, un
transfert interne mais sans préparation au changement d’atmosphère et un
transfert à travers un petit module. Le module de jonction sera équipé d’une pièce d’amarrage Apollo (entonnoir du module lunaire) d’un coté et d’une pièce de type « androgyne » de l’autre. Première difficulté, la différences d’atmosphère entre les vaisseaux. L’atmosphère de la cabine Apollo à 100% d’oxygène reste à 280 mm de mercure (elle ne peut dépasser les 414 mm). Celle du Soyouz qui est un mélange d’azote et d’oxygène passe de 780 mm de mercure passe à 520. Pour les transferts, deux astronautes passeront d’Apollo dans le module, le troisième restant dans la cabine. Le sas sera fermé. Le module sera pressurisé à 490 mm de mercure avec un mélange d’azote et d’oxygène. Le tunnel entre le module et le Soyouz sera mis en pression à 490 mm de mercure puis égalisé avec le Soyouz à 520 mm. Le module de jonction sera alors égalisé à 520 mm de mercure et les écoutilles ouvertes. Pour le retour, les opérations inverses seront réalisé, les écoutilles fermées, la pression du module sera descendu à 280 mm de mercure pour s’équilibrer avec Apollo et l’azote purgé du sang des astronautes.
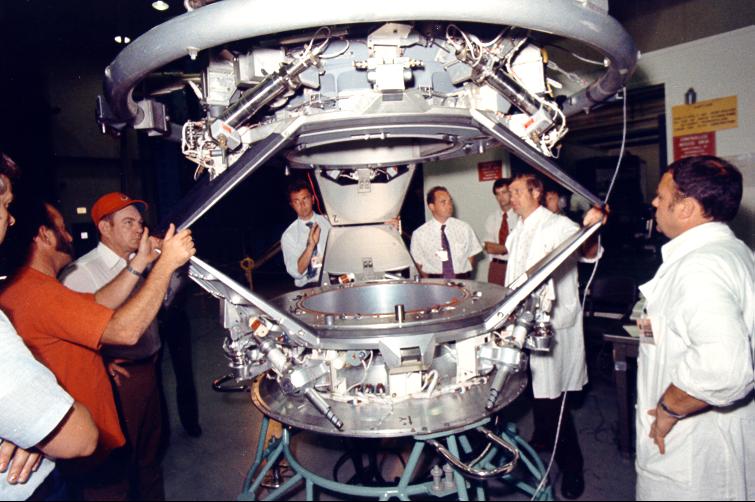
Le Docking Module en novembre 1971
LE
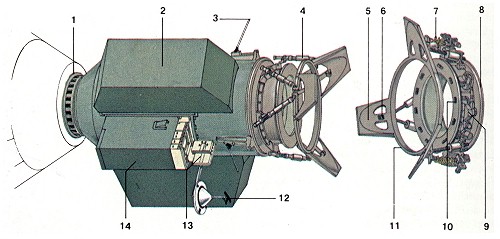
DOCKING SYSTEM C'
est à Apollo qu' incombera le transport du module de jonction dans la partie
supérieure du troisième étage S4B, là où se logeait le module lunaire pour
les missions vers la lune. La
plupart des propositions soviétiques sont acceptées. il est décidé de
fournir une compatibilité totale entre les système russes et américain en
utilisant une structure principale commune et standardisée en dimensions.
Chaque pays devra développer son propre système de jonction. Ainsi fabriqué,
il sera testé séparément avant d' être réunit ensemble. La première
maquette du Docking System DS américain et soviétique est testée ensemble
comme pour la mission réelle. Le système est installé sur Soyouz 16 et testé
en vol. Au cours de cette mission, un anneau simule Apollo. Le
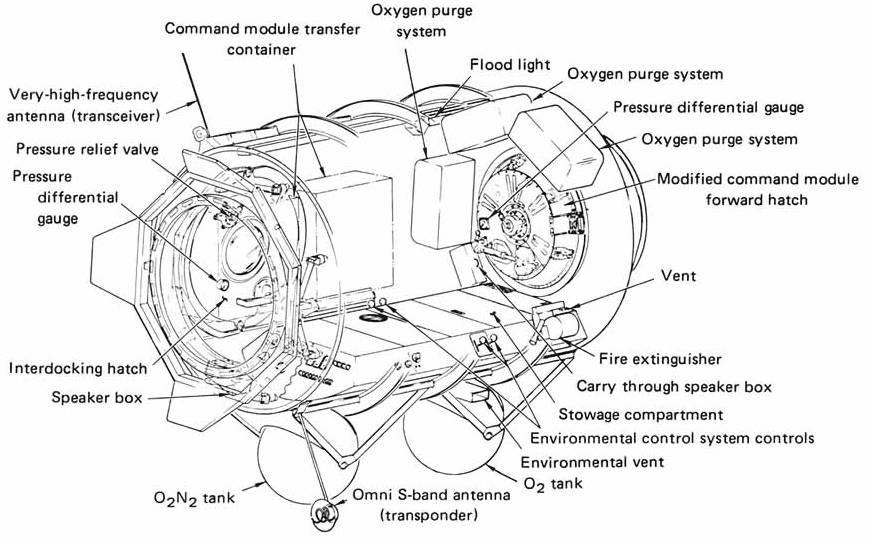
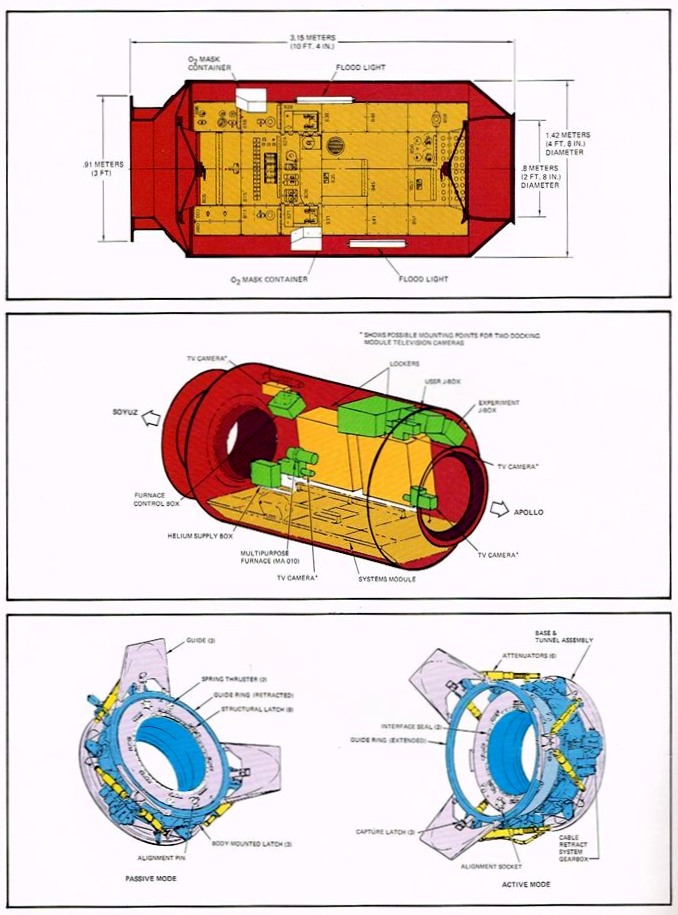
module d’amarrage est un sas équipé d’écoutilles permettant le passage
des astronautes. Il mesure 3,15 m de long pour 1,4 m de diamètre intérieur et
pèse 2012 kg. Constitué de cylindre
d’aluminium soudés de 1,58 mm d’épaisseur, il est fermé avec une cloison
conique du coté Apollo et droite du coté Soyouz. L’intérieur abrite les
panneaux de contrôle et les écrans, les transmetteur VHF-FM, le système de
contrôle environnemental et des compartiments de stockage. On trouve également
des masques à oxygène, les extincteurs, des poignés de maintien, des lampes
d’éclairage, le système d’intercom avec les deux vaisseaux, le système de
télévision et des équipements de rechange. A l’extérieur se trouvent les
quatre réservoirs de gaz (azote et oxygène) protégés d’un cadre recouvert
de couvertures isolantes. Toutes les aides nécessaire au Soyouz pour
l’amarrage sont aussi montées à l’extérieur du module, évitant de
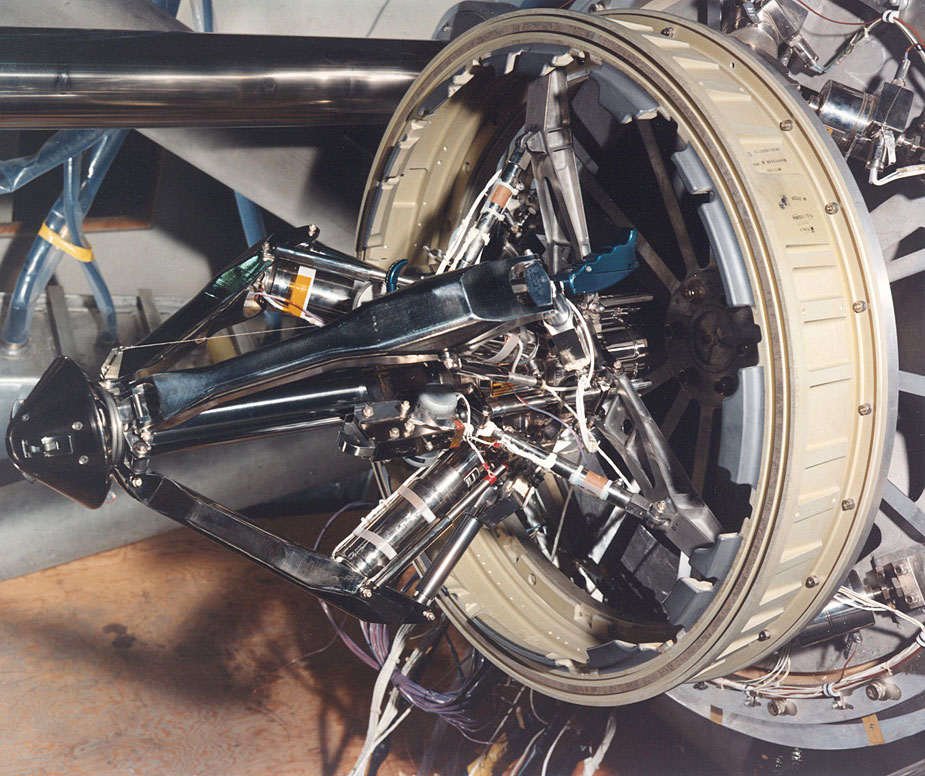
lourdes modifications sur Apollo. Le
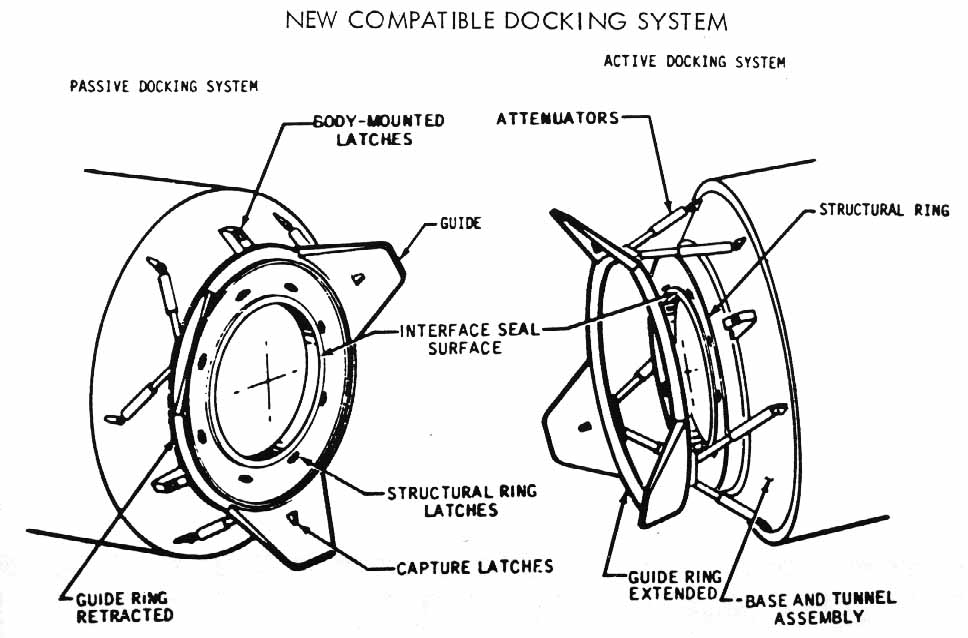
système d’amarrage est dit « androgyne » car symétrique. Il diffère
du système « tige-cône » utilisé auparavant sur chaque vaisseaux.
Il est composé d’anneaux de guidage qui s’emboîtent l’un dans l’autre
assurant après rétraction et verrouillage un tunnel pressurisé pour le
passage des astronautes. Le « Docking System » ainsi nommé a pour
fonction : Le
système de base est composé de deux anneaux, un structurel monté à une extrémité
du module et un extensible qui vient s’attacher au module orbital du Soyouz.
Les deux réunis forme un tunnel pour le passage. Le
guidage est assuré par l’anneau extensible sur lequel sont fixés trois
« pétales » disposés à 120°. Il repose sur 6 tiges de support
disposées par paire. Ces tiges permettent d’absorber l’énergie cinétique
lors de la jonction. Elles ont un degrés de liberté de +-3° en rotation. Cet
anneau est équipé de 3 verrous de capture (sur les pétales)qui viennent
s’accrocher sur l’anneau du Soyouz. Le Soyouz est aussi équipé du même
système, l’anneau de guidage étant fixe simplement monté sur des
amortisseurs. La
capture réalisée, les tiges de l’anneau de guidage du module rétractent les
deux vaisseaux afin de verrouiller les 8 crochets disposés autour de l’anneau
de structure. De petites charges pyrotechniques permettent à tout moment de séparer
en urgence les deux vaisseaux. Les verrous sur les pétales de l’anneau du
Soyouz viennent s’accrocher à des crochets sur la structure du module Le système est soit actif
soit passif. Lors de la mission, le Soyouz sera une première fois passif puis
actif. C’est Apollo qui fournit l’énergie électrique du module grâce à
un ombilical. Le contrôle de l’air (rejet du dioxyde de carbone) est assuré
par chacun des deux vaisseaux. Apollo sera actif dans l' arrimage (plus de
carburant), le Soyouz utilisant un transpondeur et un émetteur récepteur. Pour
la visé optique, le Soyouz sera repeint moitié blanc moitié vert et équipé
de phares blancs. Du matériel supplémentaire est ajouté au centre de tir et
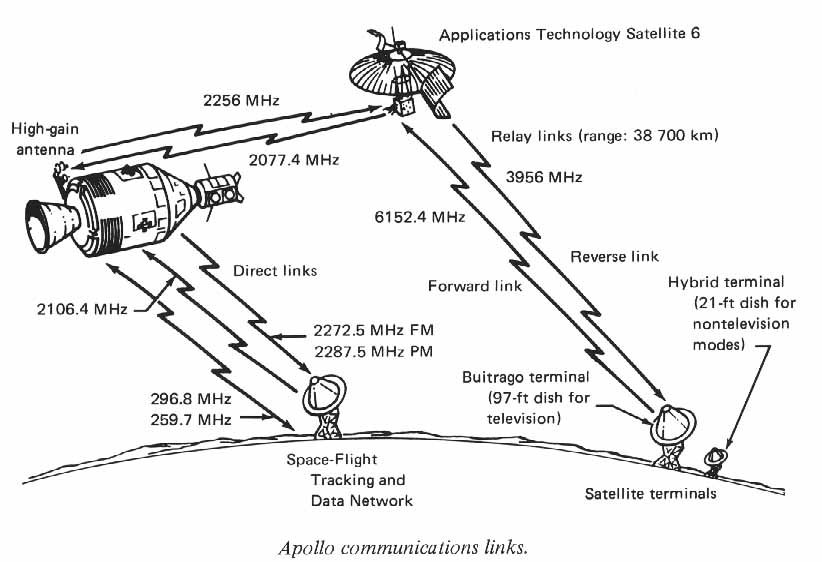
sur les vaisseaux spatiaux. Les fréquences radio sont modifiées: APOLLO
RENCONTRE SOYOUZ Après les échecs de leur lanceur N1, les
soviétiques abandonnent la lune et consacre désormais leur effort aux stations
orbitales. Mais le manque d’expérience avec les amarrages repousse l’échéance.
Il faudra attendre Soyouz 9 avec un vol de 17 jours, répétition d’un vol
longue durée et Soyouz 10. En avril 1971, le vaisseau s’amarre à la première
station orbitale Saliout 1 mais aucun transfert d’équipage n’a lieu, ce qui
inquiète les américains. Les responsables de Moscou se veulent rassurant. Leur
visite à Houston au début de l’été soulève une alternative au vol
Apollo-Soyouz jugé « cascade spatiale » : en utilisant un système
d’amarrage « androgyne », on laisse entrevoir une mission
Apollo-Saliout ou Soyouz-Skylab-Apollo. La première mission d’occupation de la
station Saliout 1 par trois cosmonautes se termine par un drame après 23 jours
dans l’espace. La défaillance d’une valve
laisse malencontreusement échapper l’atmosphère de la cabine au retour sur
terre laissant pour mort l’équipage. Cet accident refroidit les esprit,
Apollo 15 est prêt à partir pour la lune… Septembre, la NASA remanie son programme
lunaire et Post Apollo. Apollo se terminera en 1972 avec Apollo 17, suivront
trois missions d’occupation de la station Skylab. L’agence spatiale planifie
ses missions après 1975. Des CSM Apollo seront lancés pour des missions
d’observation de la terre. Un de ces vaisseaux pourrait alors s’amarrer à
un vaisseau soviétique. La mise en orbite d’un second Skylab est aussi
envisagé mais l’absence de programme pour l’exploiter fait renoncer les
responsables. De toute façons, la NASA doit développer un projet « intermédiaire »
en attendant la mise en service de la navette spatiale à la fin des années
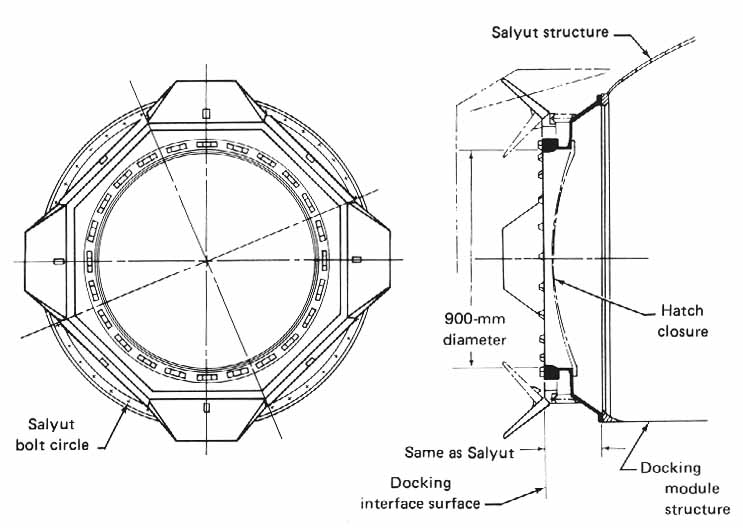
1970. Le module de jonction, DM prend forme dès
juillet 1971 dans les ateliers de North American Rockwell sous le nom de
International Rendez-vous & Docking Mission. Il mesure alors 2,75 m de long
pour 1,4 m de diamètre intérieur. Coté Apollo, l’écoutille offre une
ouverture de 84 cm contre 90 du coté Soyouz. Divers changements seront apportés
durant les mois qui suivront mais sa forme restera la même. L' accord définit signé en mai 1972 lors du
sommet USA-URSS prévoit un vol commun en 1975, stipulant l’amarrage d'un
vaisseau Soyouz et Apollo, avec visite mutuelle des deux équipages. Le Dr
Constantin Bouchouyev et le Dr Glynn Lunney sont nommés respectivement
directeur technique de l' Apollo Soyouz Test Project pour l 'URSS et les USA.
Dans l’été, une date est donné, ce sera en juillet 1975. La mission est
officiellement nommé Apollo Soyouz Test Project, ASTP. Le CSM 111 est modifié pour le vol commun dès
août 1972. Ce module de commande avait dans un premier temps été fabriqué
pour aller sur la lune avec Apollo 15. Les remaniements dans le programme
l’ont écarté des vols et c’est le CSM 112 qui a pris sa place.
La NASA pensait utiliser les CSM prévus pour les Apollo mission J, mais
les coûts de modifications et les restrictions de budget ont fait pencher la
balance en faveur d’un CSM de base. La première présentation matérielle du
projet ASTP est réalisée à l’occasion du salon du Bourget à Paris en juin
1973. Les américains avec un CSM restauré et les soviétiques avec du matériel
d’essai assemblent pour le
plaisir de milliers de visiteurs une maquette grandeur réelle . Le module de vol et son système de jonction
associé entre en fabrication en 1973. Le Docking System 5 est livré au centre
Kennedy en janvier 1974 suivit du DM2 en octobre. Les soviétiques teste le matériel
avec les Cosmos 638 et 672 (changement d’orbite) puis par l’équipage de
Soyouz 16 le 2 décembre 1974). Filiptchenko et Roubasnikov se familiarise avec
les différentes pressions atmosphérique qu' ils rencontreront lors du vol réel
et teste l'amarrage avec un anneau simulant Apollo.
|