|
La mission STS 133 ULF6 était prévue
initialement pour le 16 septembre
2010 et devait être la 134eme et dernière mission du programme STS. La
nécessité de modifier la charge utile l'expérience AMS 02 a contraint la NASA à
intervertir le vol avec STS 134. Ainsi STS 133 prend la place de 134 en
novembre et STS 134 et repoussé à février 2011. Sur le pad de tir, des
problèmes avec les longerons de la zone inter tank du réservoir
extérieur obligent la NASA a repousser le vol jusqu'en février 2011, le
stack devant être ramené dans le VAB pour réparation. La mission
STS 133 d'une durée de 11 jours a pour but d'amener un module MPLM
modifié et de le
laisser à poste attaché à ISS. Dans la soute également prend place la
palette ECL 4.
 |
Le patch de la mission STS 133 a
été réalisé par la NASA d'après une ébauche de l'artiste Robert
McCall décédé en février 2010 à l'age de 90 ans. Le logo a été
complété après sa mort par les artistes Tim Gagnon et Jorge
Cartes, qui sont les auteurs de logos de quelques missions ISS
et Shuttle. Robert McCall a dessiné le logo de la première
mission STS-1 et a participé à l'élaboration des Patch pour
Apollo 17 et STS 3. Il a aussi dans les années 1960
beaucoup travaillé sur des projets de science-fiction (dont
2001: A Space Odyssey).
L'artiste dont le nom est malheureusement peu
connu est célèbre pour ses oeuvres ayant pour thème l'espace.
Des
dizaines de millions de personnes ont vu ses créations !
Parmi les oeuvres monumentales l'ont rendu célèbre, celle
qui
ornent le centre Langley en Virginie
(une fresque
horizontale qui s’étend sur plus de 5 m de large intitulée «Expanding
the Frontier of Flight»).et
celui de Dryden à Edwards en Californie ainsi que l'immense
fresque le fameux «Space Mural» haut de 6 étages qui trône dans
le Air and Space Museum de Washington, DC vue par une dizaine de
millions de personnes... |
|
Avec plus de 400
tableaux sur l’espace, Robert McCall a toujours magnifié une
vision optimiste du futur astronautique, et ce, avec sincérité,
car il a plusieurs fois déclaré que selon lui l’humanité
finirait par vivre ailleurs que sur Terre.
http://www.mccallstudios.com/gallery_index.html |
Le lancement de Discovery
STS 133 a lieu le 24 février à 21h 45 TU,
après un problème d'ordinateur dans les installations de poursuite et de
contrôle au sol qui a retardé le lancement de 3 minutes. C'est la 29eme et dernière mission
de l'Orbiter 103 depuis 1984.
A bord, 6 astronautes commandés par Steven Lindsey (4 vols) et Eric Boe (un vol) et les MS Michael Barrat (un vol),
Alvin Drew (un vol), Steve Bowen (2 vols) et Nicole Stott (un vol).
Bowen remplace Tim Kopra blessé le 15 janvier lors
d'une chute à vélo.



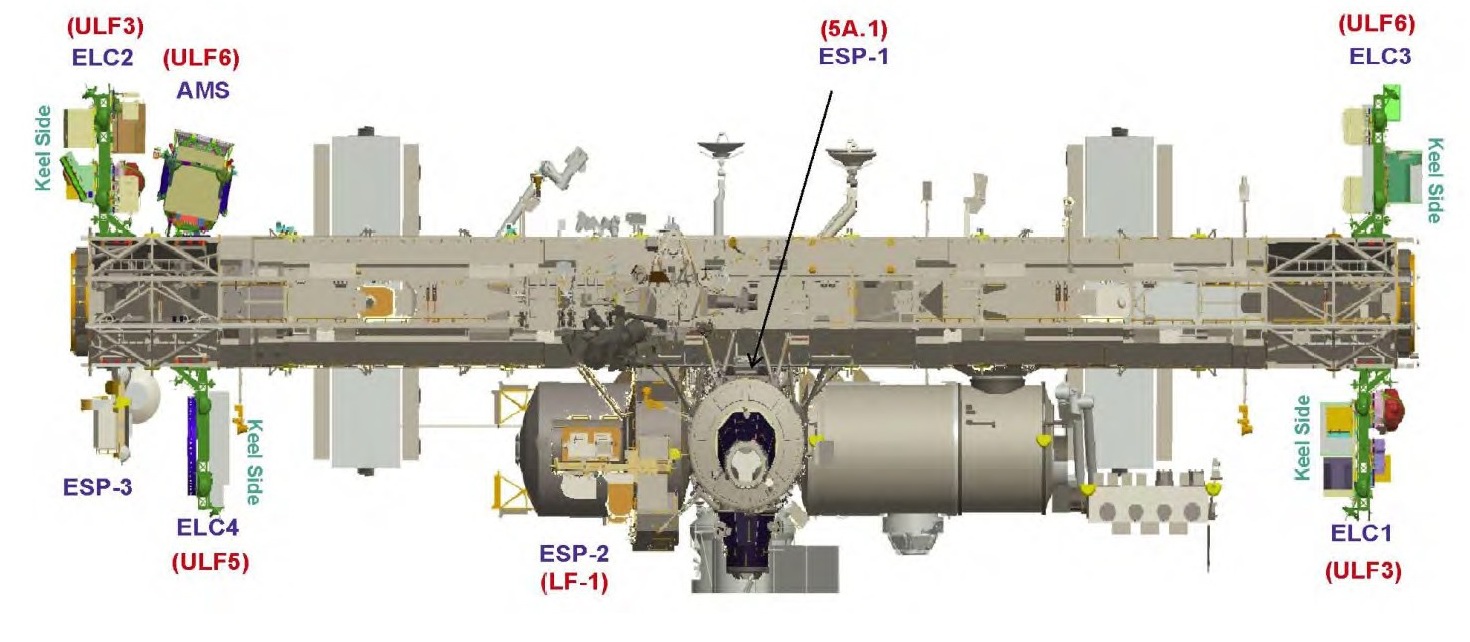
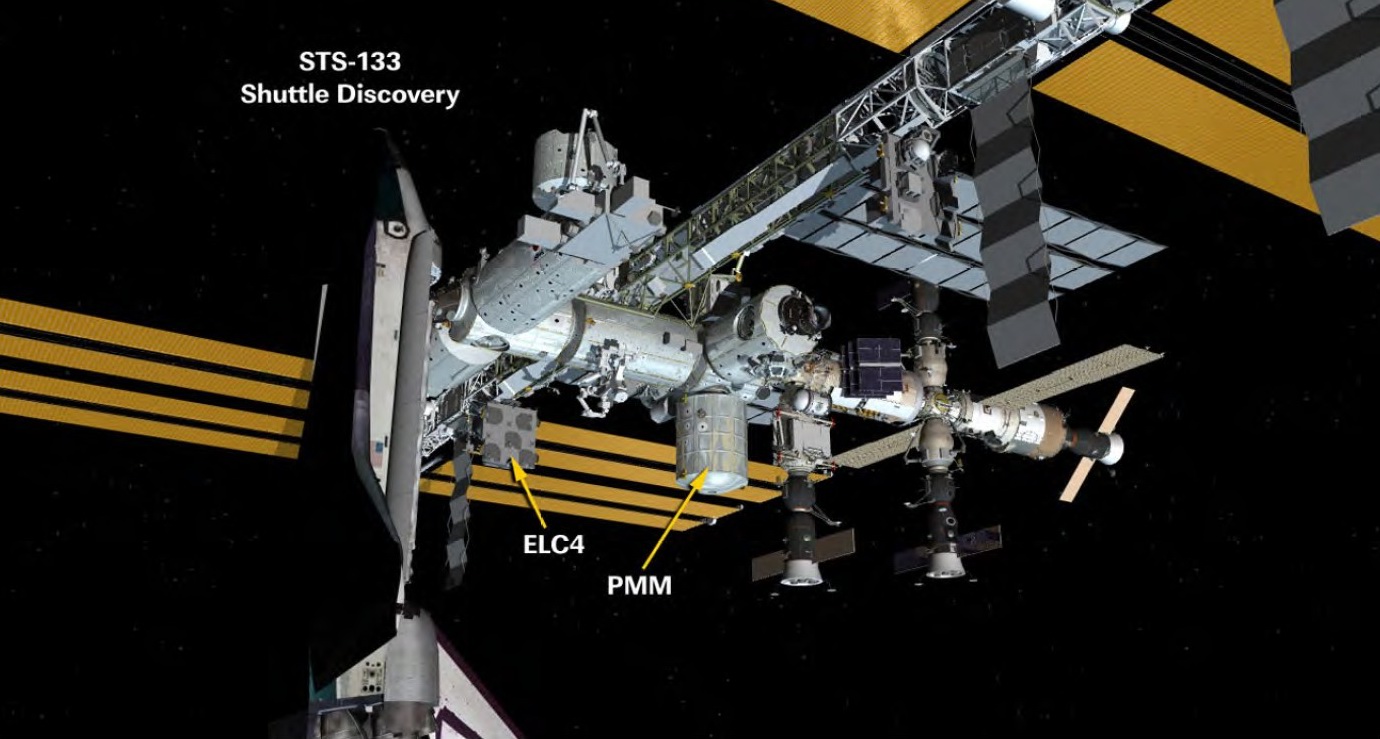
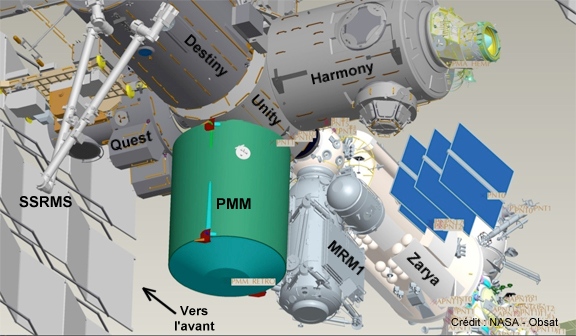
Dans
la soute, le PMM, en fait le module logistique MPLM Leonardo transformé
pour resté à poste attaché à la station et la palette logistique ELC 4
Express Logistic Carrier emportant du matériel et des équipements pour
ISS. La palette en aluminium de 3200 kg sera positionné sur la poutre S3
à coté de ELC 2. ELC 4 embarque 8 panneaux radiateur de rechange.

L'analyse
des images de l'ascension montrent qu'au moins quatre épisodes de
décollement de débris de mousse isolante ont été aperçus à l'aide de la
caméra placée sur le réservoir externe. Après la séparation du
réservoir, le trou laissé par un gros bloc de mousse manquante a été
photographié au sommet de la structure inter-tank près du bipod avant.
Cependant, comme cet événement s'est
produit à 3 minutes 51 secondes du décollage, la vitesse du bloc de
mousse par rapport à Discovery ne représentait plus un réel danger. Une
analyse poussée des images vidéo n'a pas permis de déceler de dommages
aux tuiles de protection thermique.
Au second jour de vol,
FD-2, l'équipage examine avec la perche
d'inspection OBSS standard (Orbiter Boom Sensor System) la TPS de
l'Orbiter, les ailes WLE (Wing Leading Edge), les renforts en carbone RCC
(carbone-carbone renforcé) et le nez ainsi que le système OMS.


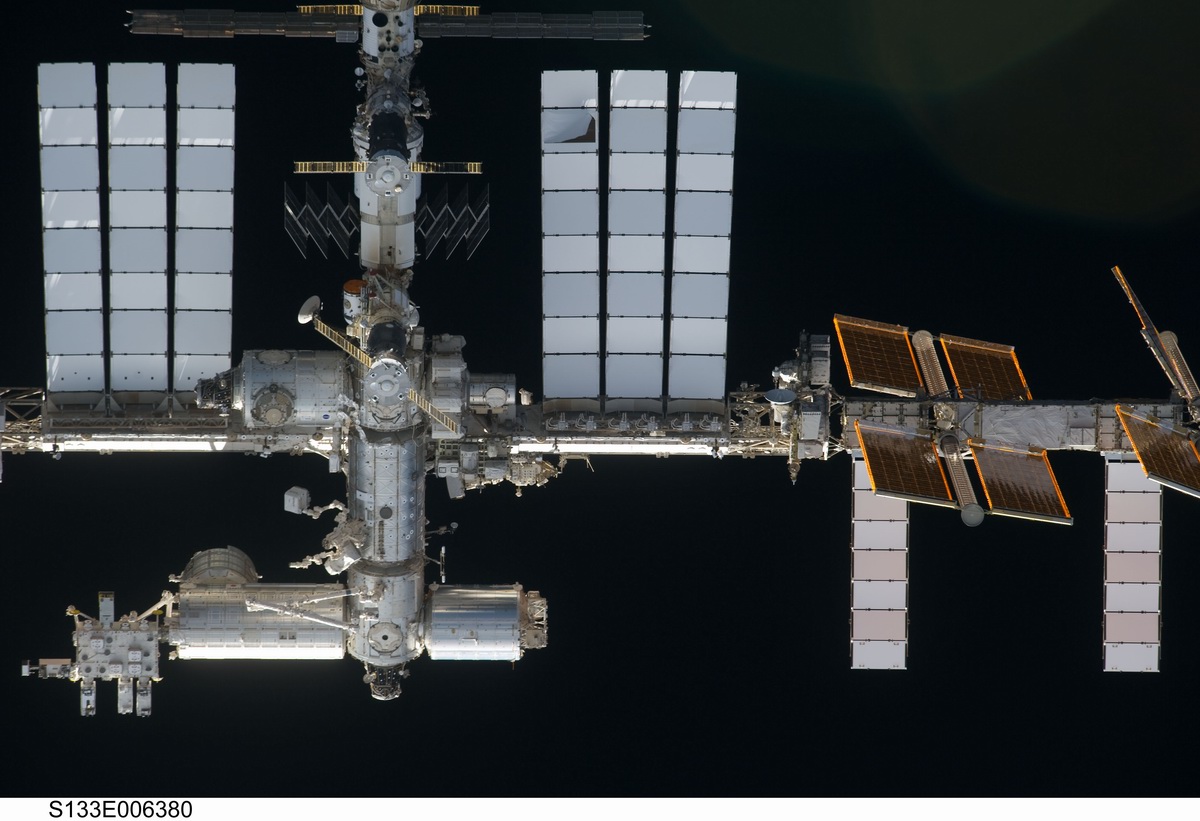
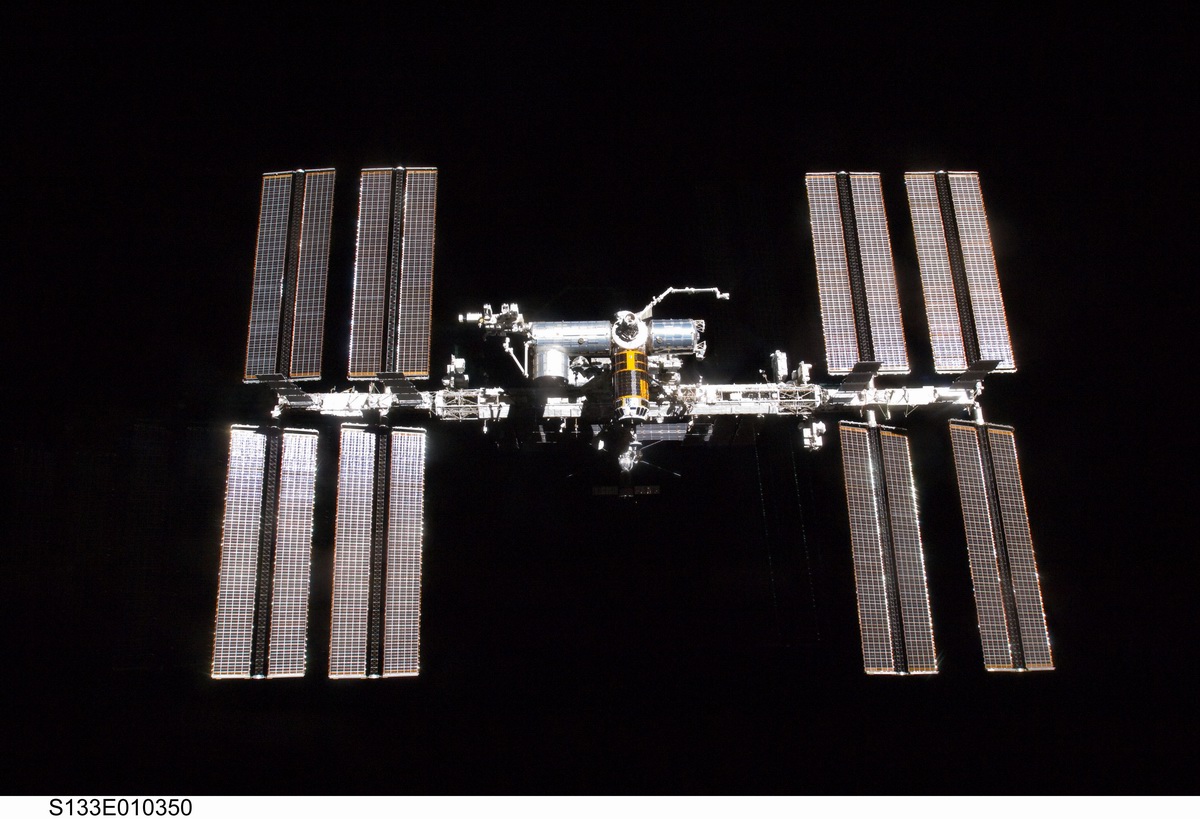
Le 26 février, Discovery
s'amarre à ISS avec deux minutes d'avance sur le planning de vol.
L'équipage rejoint les membres résidents de la station, 12 personnes
habitent maintenant la station. pour la première fois depuis le début du
programme, la station est complète avec amarré, le Shuttle, 2 Soyouz TMA,
un Progress, l'ATV européen et l'HTV japonais représentant une masse de
près de 500 tonnes.


Le 27, la palette ELC-4
est sortie de la
soute et
amarré à son emplacement permanent sur la poutre S3.
28 février, les
astronautes Bowen et Drew sortent 6h 34 dans l'espace pour leur 1er EVA.
Les astronautes réalisent des
travaux d'entretien sur la station notamment l'installation d'un câble
d'alimentation entre Unity et le Node tranquility, le déplacement de la
pompe d'ammoniaque sur le module Quest, l'installation d'une pièce sous
une caméra et le remplacement d'un guide sur le chariot CETA.


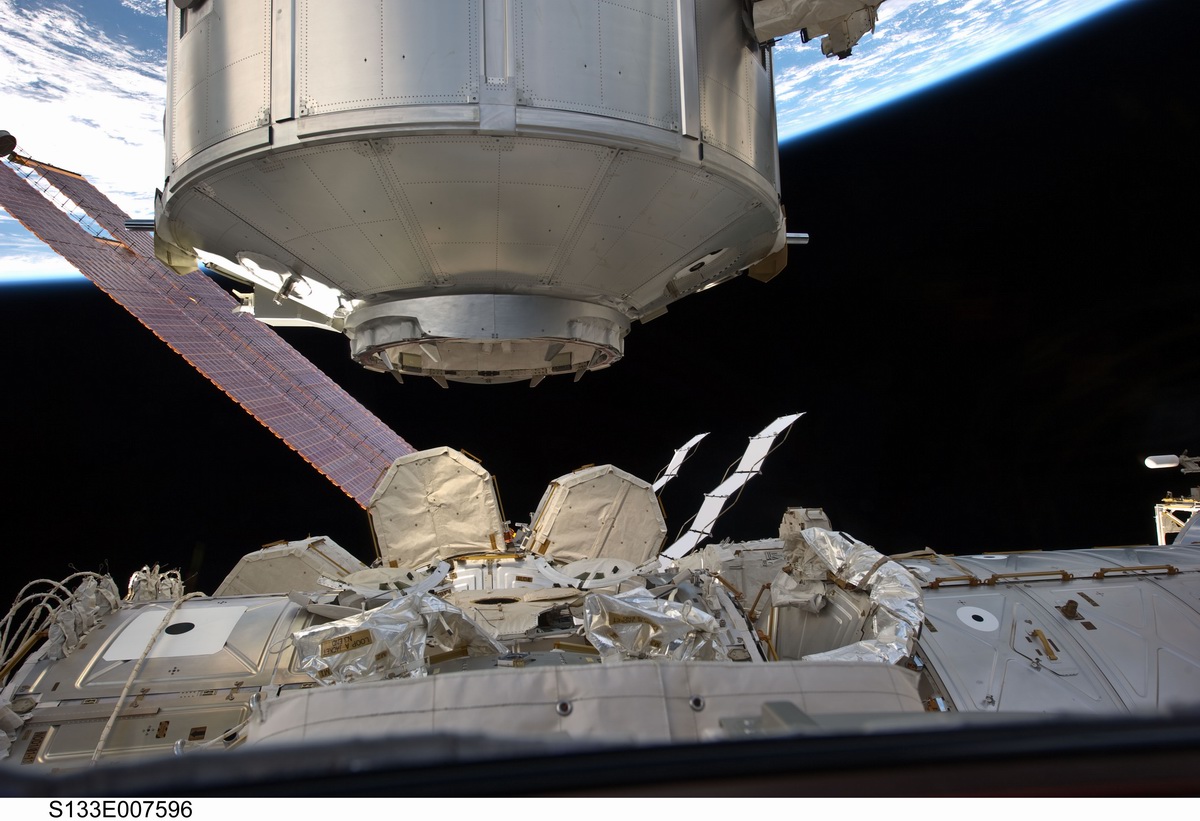
Le 1er mars, FD4, le
module logistique permanent PMM est amarré au Node 2, regardant vers la terre.



 |
 |
Le MPLM Leonardo a été choisit comme PMM
Permanent Multi-purpose Module. Les couches isolantes du module
Donatello sont en cours de modification pour être installées sur la
coque de Leonardo. Les modifications devront être faite rapidement
depuis que la date du lancement de STS 131 a glissé du 18 mars au 5
avril. Dès l'atterrissage de Discovery 131, le module sera transporté au
SSPF pour commencer son "relookage". |
 |
Complètement "déshabille", Leonardo
commencera ses modifications pour STS 133 fin mai. Le module sera
"finalisé" fin août avec notamment l'ajout de panneaux de
protection contre les micro météorites et de Mylar pour le rayonnement
solaire. Après pesé, il sera installé dans le payload
Canister et transporté sur le pad.Les MPLM construit par Thales Alenia
Space pour l'ASI, l'agence spatiale Italienne ont volé 10 fois à bord du
Shuttle depuis mars 2001. Trois modules ont été construit, seulement
deux ont volé, Leonardo (8 vols) et Rafaello (2 vols), le 3eme
Donatello, développé pour embarqué des charges utiles nécessitant une
alimentation en électricité constante a servit de "pièce détaché" pour
transformer Leonardo en module permanent attaché à ISS. Long de 6,4 m,
il peuvent embarqués plus de 9 tonnes d'équipements. La fabrication des
modules par l'ASI a permit d'échanger du temps d'utilisation à bord de
la station. La conversion du MPLM en PMM
se termine en septembre 2010. |
| Les principales modifications concernent la mise en
place d'une isolation thermique Mexter et Kevlar (Multi-Layer Insulation)
et d'une protection anti météorites (Micro Meteoroid Orbital Debris) sur
les deux tiers de la structure externe du module, le PMM devant reste
près de 10 ans dans l'espace. L'intérieur a été modifié de façon à
augmenter l'accessibilité des équipements par les astronautes, de
nouveaux modules prenant place destinés à l'étude des fluides, la
sciences des matériaux, la biologie et la biotechnologie. Enfin la masse
du module a été réduite le plus possible en éliminant des équipements de
bord. Une fois en orbite et attaché au PMA 3 d'ISS, les baies
d'instruments et d'équipements seront déplacés vers leur lieu
d'utilisation finale. Une fois vide, le PMM sera un lieu de stockage
pour divers équipements du segment US (CWS, containers nourriture,
pièces de rechange...) |

La mission est prolongée d'une journée le
28 février repoussant l'atterrissage au 8 mars. Le survol de la station
par le Soyouz TMA numérique pour photographier l'ensemble d'ISS le 5
mars a été refusé par les russes.
Le 3 mars, la mission est
à nouveau prolongé, la séparation de Discovery est maintenant prévu pour
le 7 mars à 12h03 et l'atterrissage en Floride le 9 mars vers 16h58. Une
seconde EVA de 6h 14 permet de réaliser quelques taches qui n'avaient
pas été faite lors du vol 131. Les astronautes sont chargés d'évacuer le
trop plein d'ammoniaque de le pompe en panne, ramener une plaque déposée
sur Columbus (tache initialement prévu sur STS 131) enlever une
protection thermique sur la palette ELC 4, installer une lumière sur le
CETA, dépanner un support de stockage mal installé lors du vol 131 et
installer une caméra sur le robot DEXTRE.

|
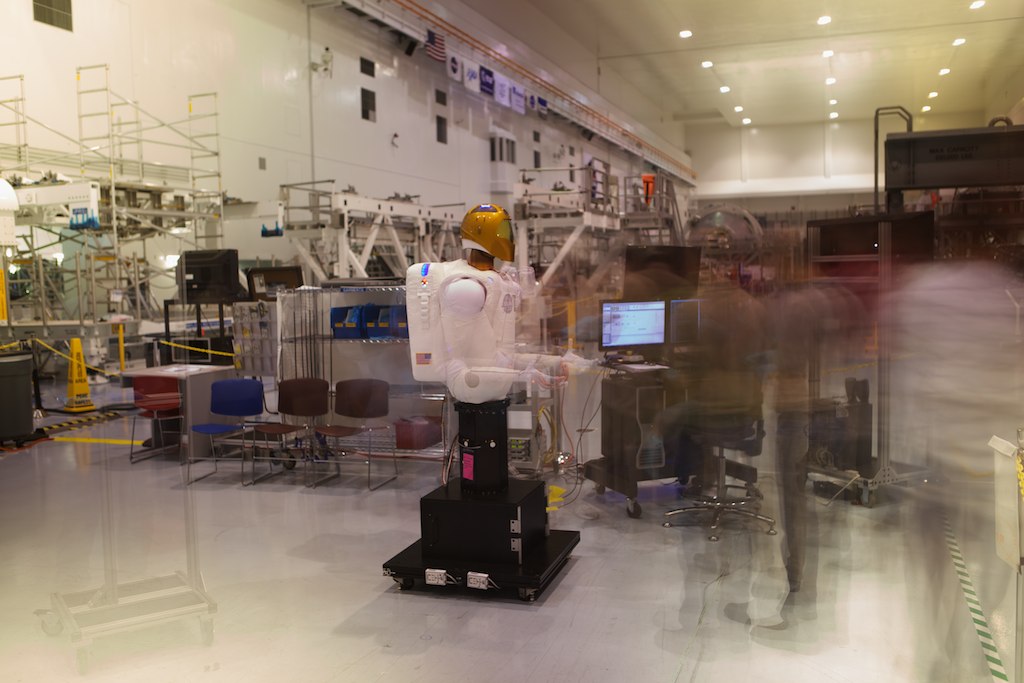
Le programme Robonaut est un
programme de recherche conjoint de la NASA (centre Johnson) et
de l'agence de la Défense (DARPA) visant à mettre au point un
robot humanoïde pouvant réaliser les travaux effectués
normalement par les astronautes durant les sorties
extravéhiculaires. Différentes variantes de robots ont été
étudiées. Ils sont animés par téléprésence et disposent d'une
autonomie partielle. Les mains du robot disposent de 14 degrés
de liberté et ont une certaine sensibilité au toucher.
R2 Robonaut 2 a
été développé avec l'aide de General Motors. Il sera conçu pour
travailler en toute sécurité en parallèle ou en assistance
directe aux missions d'astronautes humains, et également comme
robot d'assistance pour des tâches risquées et/ou difficiles à
pratiquer dans les usines de fabrication appartenant au groupe
General Motors. Ses caractéristiques lui sont conférées par un
nombre important de capteurs de toutes sortes, où la technologie
robotique notamment sur le visuel est suffisamment évoluée pour
lui permettre de l'assister dans ses tâches manuelles, au sens
littéral du terme, avec une dextérité jamais observée auparavant
sur un prototype humanoïde. 14 moteurs sont dissimulés dans son
avant bras.


Cette machine qui rappellera à certains l’apparence des soldats
de l’Empire dans Star Wars cache une technologie de pointe avec
système de caméra, capteurs sensoriels et mains articulées
pouvant lever un poids d’environ 10 kilogrammes ou écrire avec
un marqueur et tapoter sur un téléphone. Sa tête est inspirée du
personnage de Boba Fett dans la saga Star Wars. Elle dissimule
deux petites caméras couleur qui lui confèrent une vue en
relief..
Le constructeur GM compte de son côté profiter de cette
technologie pour élaborer des voitures et des matériaux plus
sûrs. Ce n’est d’ailleurs pas la première fois que les deux
sociétés travaillent ensemble puisque leur partenariat remonte
aux missions Apollo et à la conception du premier véhicule
lunaire.

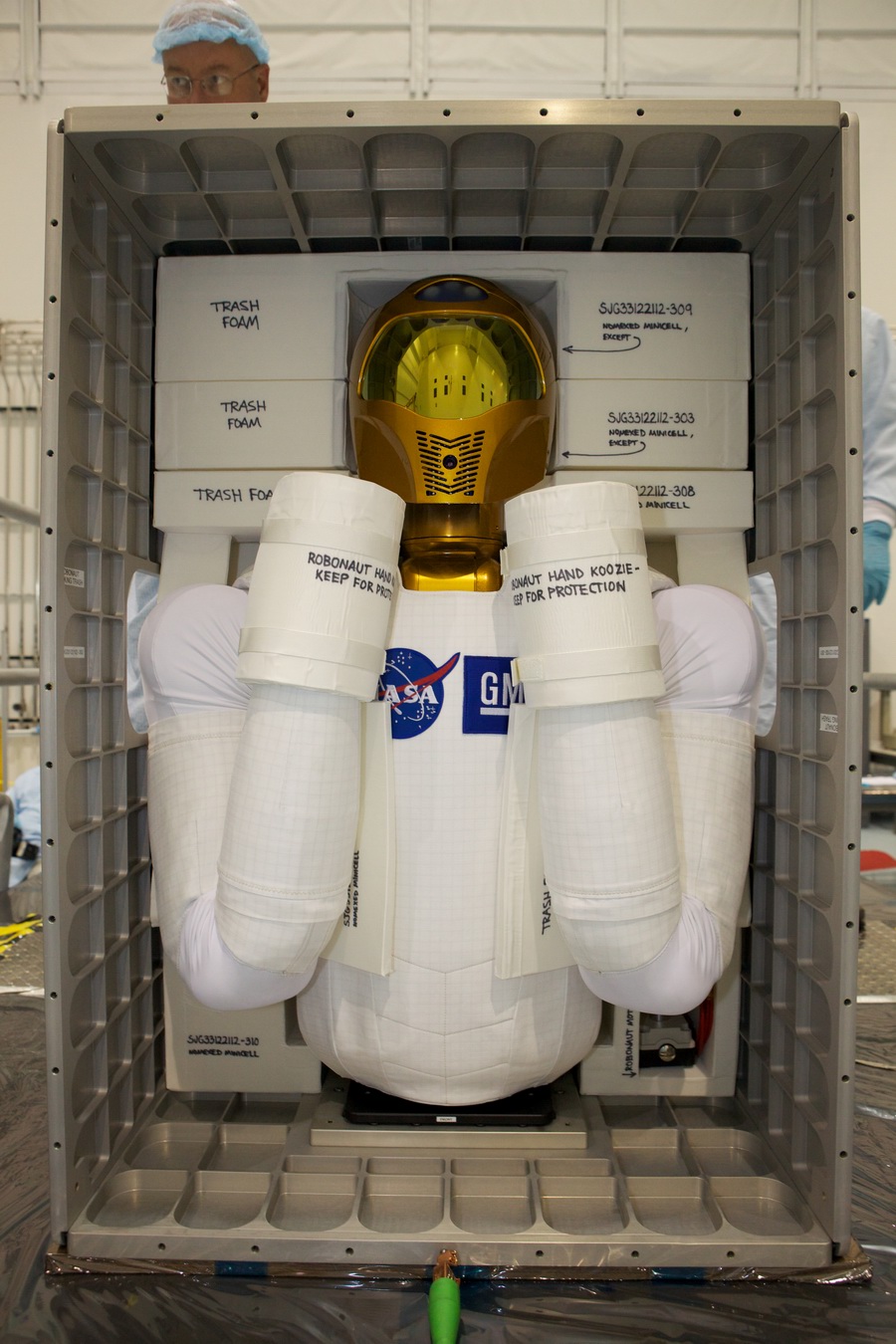
Juillet, séance
d'habillage pour R2 avant sa livraison au KSC aidé par les
ingénieurs de Edmondson ainsi que le désigner de ses vêtements
spatiaux. R2 aborde cette tenue particulière en raison des
contrainte de sécurités incendie dans la station.

R2 » à l'intérieur
de la chambre de perturbation électromagnétique du centre spatial
Johnson après des essais effectués avec succès, qui assurent que les
systèmes électroniques du robot ne poseront pas de problèmes
conflictuels avec les autres systèmes importants et vitaux (pour les
hommes) de la Station Spatiale Internationale.

R2 est arrivée au KSC en août.
Testé, il a ensuite été installé dans son container de transport
avant d'être mis dans le module Leonardo.


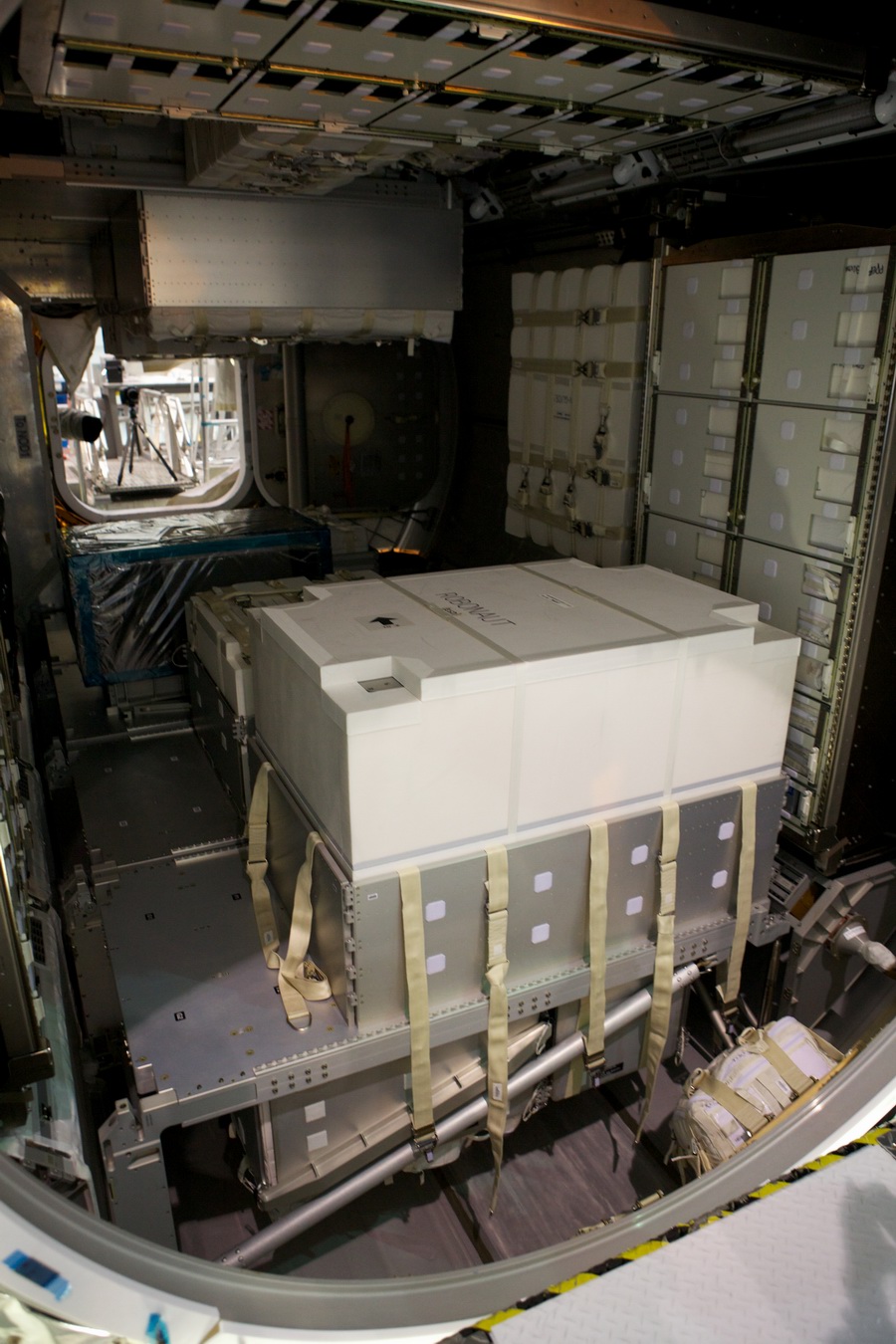
R2, est mis en place à l'intérieur
du module permanent PMM Leonardo, qui sera également rempli de
fournitures et de matériel destiné à la station. En orbite, il
sera ensuite installé en permanence au niveau du nœud de
jonction Unity. Une fois que R2 sera déballé, vraisemblablement
plusieurs mois après son arrivée a bord, il sera d'abord utilisé
à l'intérieur du laboratoire Destiny (dans le rack LAB1D2) pour des essais
opérationnels, mais au fil du temps ses applications pourraient
s'étendre. Il n'est pas prévu de retourner sur Terre. R2
"dormira dans le LAB1P1, un rack vide dans Destiny
Initialement R2 sera déployé
et fixé sur un pédestral dans la station. Par la suite, il
devrait être amélioré avec l'ajout de jambes pour pouvoir se
déplacer en dehors de la station et plus tard marcher sur le
lune ou Mars. Par rapport à son prédécesseur R1, R2 est capable
d'utiliser de nombreux outils pour les EVA. Il est 4 fois plus
rapide, plus compact, plus mobile avec beaucoup plus de
senseurs. il sera capable d'utiliser les outils qu'utilisent les
astronautes dans l'espace. |

7 mars, Discovery se sépare de la
station. Le Shuttle fait un tour complet autour des modules pour prendre
des photos. Les astronautes procèdent ensuite à une inspection du
bouclier thermique de l'Orbiter avant de préparer leur retour sur terre.





9 mars, Discovery touche
la piste du KSC à 16h 57 TU.

|