|
UNE MISSION TYPE
|
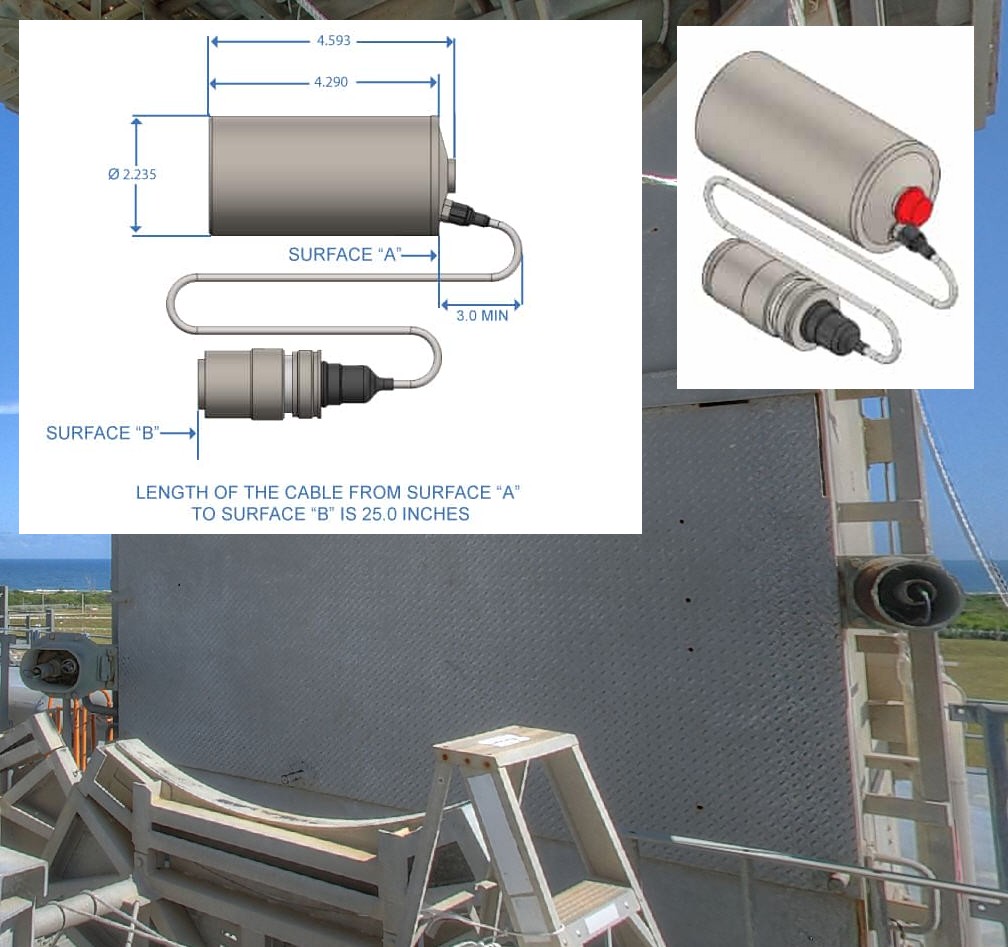
LANCEMENT ET OPERATIONS EN VOL _ T moins 10 s "Go for main engines start", les moteurs SSME sont prêt pour l'allumage. A ce moment, 4 "chalumeaux", appelés "Hydrogen Burnoff Igniters HBOI" ou Radially Outward Firing Initiators (ROFI's) situés le long des TSM de la plate-forme de lancement enflamment les restes de vapeurs d'hydrogène qui sortent à travers les tuyères des moteurs, afin d'éviter une explosion au moment de l'allumage proprement dit. Les HBOI fonctionnent pendant 8 secondes environ.
Les ROFI sont des petits moteurs fusée fixés
sur les TSM autour de la fosse SSME qui brûlent des particules de Zirconium.
Leur flamme est si puissante qu'elle transporte les étincelles sur au moins 5
mètres permettant de brûler tout excès d'hydrogène. Bien que le système est été
testé en amont, le véritable test eu lieu lors du FRF, premier essai des moteurs
SSME sur le pad en février 1981. Les ROFI étaient programmés pour s'allumer à
T-3,3 secondes. Après analyses de l'essai, il fut décidé d'allumer les ROFI à T-
7 secondes pour le premier vol STS 1, le temps de complètement brûler l'excédent
d'hydrogène avant l'allumage des moteurs proprement dit. Après STS 1, le compte
à rebours est réaligner pour que T 0 corresponde à l'allumage des SRB,
l'allumage des ROFI est passé à T-10 secondes, 3,4 secondes avant l'allumage des
SSME.
_ T moins 6,6 s, les trois moteurs SSME s'allument à 120 ms d'intervalles. En trois secondes, ils atteignent 90% de puissance.
Allumage des SSME. _ T moins 3 s, les SSME sont à 90% de leur puissance. Le haut du réservoir externe se déplace de 65 cm à cause de la poussée des moteurs de la navette, qui pour l'instant est encore clouée au sol. La séquence d'allumage des SRB est commandée. Les ordinateurs de bord sont capable d' arrêter les SSME juste avant l'allumage des SRB, si nécessaire. Les plaques ombilicales restent attachées à l'arrière de l'Orbiter jusqu'à l'allumage des boosters. Au travers de chaque plaque passent outre les l'alimentations en carburant et comburant et les fluides, les lignes de commande électrique et informatique qui route les commandes du LCC en vol d'arrêt des moteurs SSME. A T- 9 minutes démarre la Ground Launch Sequence
avec la rétraction du bras OAA, démarrage des APU, pressurisation du réservoir
LOX et l'arrêt du plein en LH2. A T-31 secondes démarre la séquence RSLS,
Redundant Set launch Sequencer. Après T- 5 minutes, si une interruption est
demandée (un "hold"), le compte à rebours va continué jusqu'à T-31 secondes,
l'arrêt sera fait sur une des étapes de la chronologie finale, comme T-2 mn 55
pour avoir la pressurisation du réservoir LOX. Après T-31 s, la seule option
possible est l'arrêt (Cutoff) qui oblige à reprendre le compte à rebours à T-20
minutes. Lorsque le premier moteur SSME est allumé (T-6,6 s) et qu'il faut tout
arrêter, il y a ce qu'on appelle la séquence "RSLS abort". _ T- 0, le haut du réservoir revient en
position "neutre", à la verticale. A ce moment la, les boulons qui tiennent les SRB sur la
plateforme explosent et les SRB s' allument 1/100 de secondes après. Les ombilicaux sont arrachées de
l'arrière de l' Orbiter et se rétractent dans les TSM. Le Shuttle décolle.
Le décompte s'arrête et le "Mission Events Timer" démarre. En cas d'anomalie sur les moteurs, la
séquence est arrêtée, on est en situation de "On pad Abort Shutdown".
Les moteurs ont 4 secondes pour démarrer et atteindre 90% de leur puissance.
Quand la séquence d'arrêt est initiée, les trois moteurs s'éteignent à une
seconde d'intervalle (T 0, T+1,1 et T+ 2,4 seconde). A ce moment, la purge avec
de l'hélium est lancée ainsi que le système d'extinction par eau le "firex"
entre T+ 3,7 et 5,5 secondes. Le seul gros problème lors de cette manoeuvre est
de limiter la concentration d'hydrogène gazeux dans les moteurs. C'est pour
cette raison que lors de l'allumage, les HBOI entrent en action pour brûler les
résidus. Malheureusement, leur action n'est pas assez longue pour être
efficace lorsque se produit un arrêt moteur. Tout un système de contrôle
permet de limiter cette concentration d'hydrogène gazeux autour des
moteurs. 1/ L'hydrogène non brûlé dans le moteur se mélange avec
l'oxygène ambiant et se consume dans la flamme de sortie jusqu'à ce que le
niveau de concentration soit inférieur à 4%. Si tout va bien pour la navette, on peut amorcer l'allumage. Le système d'allumage (PIC : Pyro Initier Controller - Contrôleur d'allumage pyrotechnique) doit pour déclencher l'allumage avoir trois ordres des calculateurs de la navette. - Tout d'abord, le signal « Arm » de l'interrupteur de sécurité (signal en 40 volts DC). Ensuite, il doit recevoir deux ordres de mise à feu
des ordinateurs de la navette « fire 1 » et « fire 2 » (signaux électriques
en courant continu avec une tension de 28 V). Le premier « fire 1 » est
envoyé quand les 90 % des moteurs de la navette ont été atteints et le «
fire 2 » est envoyé à T quand tout est paré.
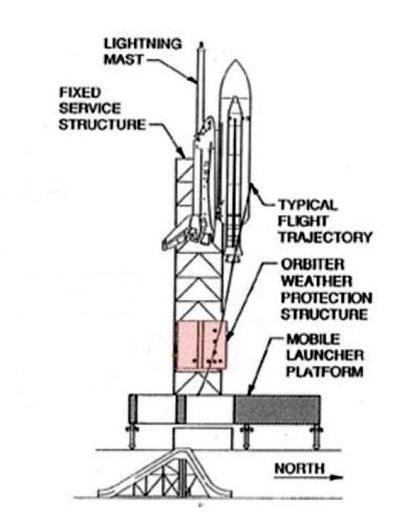
La trajectoire "typique" du Shuttle au décollage: la poussée asymétrique des moteurs SSME et des SRB fait dévier l'ensemble vers le Nord, le stack passe au dessus de la plateforme de lancement. Sur le pad, le plan de la voilure de l'Orbiter est au même niveau que le coté Sud de la tour FSS et celui du réservoir externe passe par son centre. A l'allumage des moteurs SSME, le stack se déplace de près de 2 mètres au niveau du cockpit vers l'avant. Quand il repasse à la verticale, les SRB sont allumés et l'ensemble décolle en se déplaçant vers le Nord. Le haut de la dérive verticale passe pau niveau du coté Sud e de la tour lorsque le Shuttle "cleared the tower" _ T + 7 s, le Shuttle se dégage de la tour, le centre de Houston prend la relève pour le contrôle du vol. Ce sont les tuyères des SRB aidées par celle des SSME qui pilotent le stack après le dégagement de la tour, assurant les manoeuvres de tangage, lacet et roulis. Après séparation des SRB, les moteurs SSME pilotent l'Orbiter jusqu'à la mise en orbite. Après STS89, les moteurs OMS étaient allumés durant cette période, non pas pour assurer le pilotage mais pour fournir un "boost" supplémentaire à la mise en orbite, durant 100 secondes. Chaque moteur SSME peut bouger selon les 3 axes, en lacet (Yaw) jusqu'à 8'30" à partir de la position neutre. La position neutre des 3 SSME correspond à 10' en hauteur en tangage et 3'30 en lacet négative pour les moteurs gauche et droit et 16' en tangage et lacet positif pour le central. Quand les moteurs sont en position neutre, aucun ne peut rentrer en collision avec son voisin.
Construit en 1963 pour le programme Apollo au Texas plus pour des raisons politiques que techniques, le MCC ou "Mission Control" se charge des vols spatiaux habités Américains depuis la mission Gemini 4 en juin 1965. Le MCC a guidé les premiers pas d' Armstrong sur le lune et sauver le vaisseau Apollo 13 en perdition. Situé dans un bâtiment carré sans fenêtre, le Building 30, le MCC est équipé de deux salles Flight Control Rooms, les FCRs "Fickers" pour suivre les vols Shuttle. La première salle est au second étage et sert pratiquement à toutes les missions. La seconde au troisième étage est réservé au DoD, mais sert aussi de temps en temps pour les missions plus complexes. Dès que le Shuttle dépasse la tour, " Clear the tower ", toutes les communications, voix et réseau TV se commutent vers Houston, par l' intermédiaire du réseau de station au sol GSN et le réseau de satellite TDRS. En cas de problèmes au centre de Houston, ouragans ou autres catastrophe, un centre de secours prend le relais à White Sands au nouveau Mexique. Dans les FRC, une équipe de 30 contrôleurs attachés à leur consoles se chargent du vol 24 heures sur 24 et 7 jours sur 7. Chaque équipe est managée par un directeur de vol. Chaque année, les équipes des FRC se modernisent et se spécialisent. Par exemple, un équipe devient responsable de l' ascension et du retour sur terre. Deux autres se chargent des opérations en orbite et une quatrième planifie les activités pour les prochains jours. 16 consoles principales opèrent dans les FRC pour une mission normale. Chacune est signalée par un signal d' appel particulier.
Opérant avec les FRC, le POCC, Payload Operation Control Center, est chargé du contrôle des charges utiles commerciales emportées par le Shuttle. Le POCC est situé au centre Marshall en Alabama, près de Huntsville pour les missions Spacelab, mais chaque centre NASA ou autres peut installer son POCC et gérer ses charges utiles, comme le centre Goddard avec le JPL à Pasadena pour les missions inter-planétaires. Pendant le vol propulsé, la responsabilité du suivie
radar et télémétrique incombe au Goddard Space Flight Center, à Greenbelt,
Maryland. Il coordonne l' ensemble du réseau de poursuite NASA et DoD sur tout
le globe. Les installations comprennent : Le GN est un réseau mondial de poursuite au sol constitué de 12 stations réparties dans le monde entier, île de l' Ascension, colonie britannique Atlantique Sud, Santiago Chili, Bermude, Dakar Sénégal, coté ouest de l' Afrique, Guam, Hawai, Merritt Island en Floride, Ponce de Leon en Floride et Wallops Island en Virginie. Les stations du DSN sont situées à Canberra Australie, Goldstone Californie et Madrid Espagne. Le système est équipé d' antenne de plus ou moins grand diamètre opérant dans toutes les bandes de fréquences autorisées, radio, micro ondes, téléphone, câble sous-marins, satellite. Le réseau Space Network peut remplacer le réseau au sol en cas de besoin. Il est entièrement basé sur le système de satellite TDRS déployé par les missions STS au cours des années 1980-90. C' est le réseau de poursuite le plus moderne au monde. Il est géré par le White Sands Ground Terminal au nouveau Mexique avec notamment une antenne parabolique de 18 m de diamètre (bandes Ku). En 1987, un second centre de contrôle de secours est mis en place pour parer aux prochaines missions.
T + 20 s. : La navette a fini sa phase de rotation et d'inclinaison. T + 26 s. : Réduction de la poussée des moteurs et des boosters : on réduit le débit en combustible pour les moteurs principaux, et le design interne des boosters fait que leur poussée diminue 26 secondes après le lancement. C'est une zone où la pression sur la navette est très importante. T+45s, Mach 1
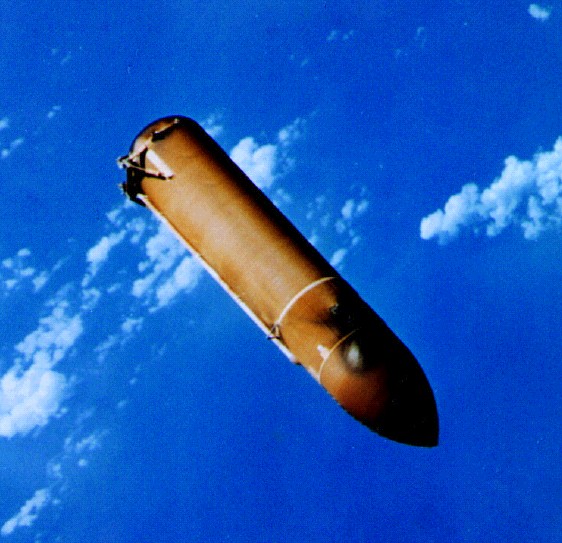
T + 1 mn, le Shuttle passe la limite Q max, ou la pression dynamique est maximale vers Mach 1,5. L' altitude est de 11 000 m et la puissance des moteurs SSME est réduite à 75% . Passée cette zone, les gaz sont remis. Passage à Mach 2. T + 1 mn 49 s (sep SRB- 10,3 s) : Les deux boosters ont une pression interne inférieure à 9 bars durant 4,3 s. Mach 4. T + 1 mn 54 s (sep SRB - 6 s) : Début de la séquence de séparation, la poussée des boosters est quasi nulle. T + 2 min : Séparation par boulons explosifs des boosters, l' altitude est de 60 km et la vitesse 5040 km/ h. Ils continuent un moment sur leur lancé avant de retombé en mer suspendu à des parachutes. Les boosters seront ensuite récupéré et restaurés pour un prochain vol.
La séparation des boosters est initialisée quand les
3 capteurs de pression de la chambre de combustion de chaque booster ont relevé
une pression inférieure à 3,4 bars. Une fois le booster séparé, sont allumés les 8 moteurs d'éloignements du boosters. Ces moteurs vont pousser perpendiculairement au sens de la trajectoire, de manière a écarter le booster de la navette. Ces moteurs sont regroupés en deux groupes de 4, un à l'avant et un à l'arrière. Ils vont fonctionner pendant 1,02 s. Chacun de ces moteurs est de forme cylindrique, de 79 cm de long pour 32,5 cm de diamètre. Les câbles et lignes d'autodestruction sont aussi débranchées du réservoir. Le booster doit donc ensuite continuer à monter un peu tout en s'éloignant de la navette. Ils seront récupérés en mer, pour lavage, remplissage et réutilisation.
La navette passe alors en deuxième phase de vol. Ce sont les tuyères des moteurs SSME qui assurent le pilotage du véhicule. T + 5 min. 45 s : Déploiement du premier parachute des boosters SRB. T + 6 min. 55 s : Les boosters entre en contact avec l'eau. Ils flottent et laissent dépasser 9 m. hors de l'eau. La navette est toujours en accélération. T + 8 min. 30 s. : Extinction des 3 moteurs principaux de la navette. Équipage en orbite. Reste à faire une ou deux manœuvres d'insertion sur orbite (avec des moteurs moins puissants pour viser la bonne orbite). T + 8 mn, fin de la seconde phase de vol avec l' arrêt
des moteurs SSME, MECO Main Engine Cut Off à 108 km d' altitude et à 26 715
km/ h. Pour se placer sur une orbite donnée, la navette doit atteindre une
vitesse déterminée. Dès que cette vitesse est atteinte, on démarre la
procédure d'extinction des moteurs ou MECO. Cette procédure très précise va
permettre d'éteindre les moteurs sans les abîmer avec un mélange oxygène /
hydrogène trop riche en tel ou tel composant. Pour l'extinction des moteurs, il est préférable
d'avoir un mélange riche en hydrogène car dans le cas inverse, cela
occasionnerai des dégradations notables sur les moteurs. C'est pourquoi, pour
garantir que le mélange sera plus riche en hydrogène, on embarque 320 kg
d'hydrogène en plus. Ainsi, ce seront les capteurs de l'oxygène qui
émergeront les premiers. Une fois le MECO effectué, on va effectuer le largage du réservoir. Pour cela, de petits explosifs sont déclenchés sur les attaches arrière et avant de la navette sur le réservoir. Les canalisations sont alors fermées et la navette embarque au total quelques centaines de kg d'hydrogène et d'oxygène qui vont permettre de conserver un centre de gravité correct dans la navette lorsque nous serons en orbite. Pour effectuer le largage, on va d'abord clore les canalisations entre le réservoir et la navette. Ensuite, on fait sauter les valves pyrotechniques avec des explosifs. Les points d'attache sont aussi décrochés avec de petits explosifs. Ensuite, la navette rétracte avec des vérins pneumatiques les attaches arrières avec le réservoir. Le système embarqué du réservoir est éteint. Ensuite, pour s'éloigner plus vite du réservoir, la navette va utiliser ses petits Moteurs de Contrôle d'orbite RCS pour s'éloigner pendant 13 secondes du réservoir à la vitesse relative de 3,4 m/s. Le réservoir ira se consumer dans l'atmosphère, et n'est pas récupéré A ce moment l' Orbiter est sur une trajectoire suborbitale qui l' amènera en rentrer dans l' atmosphère après un tour de terre si rien n' est fait. Une mise à feu brève des moteurs de manœuvre OMS 1 permet de garder l' orbite. La méthode dite par insertion demande deux mise à feu des OMS, la seconde à l' apogée pour circulariser l' orbite (OMS 2) tandis que la méthode directe permet de réaliser la mise en orbite grâce aux moteurs SSME, les OMS ne servant qu' à la circularisation. Cette dernière méthode a pour avantage d' économiser du carburant. Elle est notamment utilisée quand le Shuttle a besoin de gagner des orbites hautes pour la réparation de satellites entre autre. La trajectoire avec insertion directe en orbite (DI) a utilisée pour la première fois en 1984. Elle permet d'utiliser la propulsion des moteurs SSME pour gagner une orbite à haut apogée au moment de la coupure des moteurs (MECO), au lieu d'utiliser les moteurs OMS (OMS 1) après MECO. Pour les vols vers la station ISS, les moteurs OMS sont allumés après le largage des boosters pour améliorer les performances (PE Performance Enhancement) et augmenter la charge utile des Orbiters. La poussée des OMS est très supérieure à leur masse. On remplit donc les réservoirs au maximum.Avec ce type de trajectoire, la masse des propergols sauvée dans les réservoirs des OMS est récupérée sur la charge utile, La trajectoire DI est devenu un standard au début des années 1990. L'assistance des moteurs OMS a été ajouté par la suite. L'augmentation de la charge utile des Orbiters a aussi été possible grâce à l'utilisation des ET super allégés SLWT, le changement de la position des moteurs durant le vol propulsé, la réduction de la masse à vides des Orbiters à la fin des années 1990, les changements de trajectoire, etc...
Pendant la phase d' ascension, le Shuttle n' est pas à l' abri d' une défaillance. Celle ci peut malheureusement se produire à n' importe quel moment du vol. De T 0 à la séparation des boosters, il n' y a aucun moyen de sauver le véhicule et l' équipage, les astronautes de la mission 51 L en 1986 en ont fait la triste expérience. Bien sur en cas de problèmes avec les boosters, il y a la possibilité de les larguer en vol, encore faut il pouvoir le faire, et apparemment ce n' est pas prévu par la NASA. Donc de T 0 à T + 2 mn, rien ne peut être tenté pour
le véhicule et encore moins pour l' équipage. En cas de perte de puissance, arrêt moteur SSME, les modes d' interruption choisis seront par ordre de préférence ATO, AOA, TAL et RTLS selon le moment du vol. En cas de perte de pression en cabine ou du système de refroidissement, la NASA cherchera à abréger le plus rapidement possible la mission. Les modes préférés seront TAL et RTLS. Le mode d' interruption peut être choisi par l' équipage en sélectionnant les interrupteurs voulus. Normalement la sélection et l' ordre d' exécution est donné par le MCC. Quand un mode est sélectionné, les ordinateurs de bord s' y commutent immédiatement. Il peut arriver qu'un problème de moteur ou de vérin
entraîne la navette sur une trajectoire pouvant occasionner des dégâts si
elle s'écrase. Ce système d'autodestruction (Range Safety System RSS)
ne se déclenche que sur ordre du centre de lancement et par une personne. En
aucun cas, ce n'est un ordinateur, qui pourrait se tromper ! Chacun reçoit donc deux ordres, l'ordre de s'armer (se préparer) et celui de mise à feu. Cet ordre vient du sol, entraînant l'explosion totale et irrémédiable de la navette… et de ses occupants. Cela ne s'est jamais produit, car en fait, pour effectuer cette autodestruction, la navette doit être sortie de son couloir de vol, ou avoir violé une ligne rouge de lancement. Ces lignes rouges et couloirs de vol sont définis pour que la navette ne passent pas aussi de zones habitées où elle risquerait de s'écraser. Pour déclencher l'autodestruction, le sol envoie à la
navette un signal « Arm » (armer) qui va armer le système, c'est-à-dire
juste le préparer sans exploser pour l'instant. En même temps, un voyant
lumineux va venir s'allumer sur les tableaux de bord du commandant et du pilote. Ce but de ce système est de pouvoir stopper le mouvement de la navette qui pourrait se diriger sur une trajectoire dangereuse pour des vies humaines par exemple. En explosant, le réservoir et les boosters dispersent leur combustible empêchant une trop importante explosion si la navette s'écrase. L'équipage n' est averti que quelques instants avant qu'il soit, lui aussi, perdu. En effet, les membres d'équipages sont sanglés sur leur sièges mais aussi complètement écrasés par l'accélération sur leur dossier. Donc, leur vie se terminera en même que celle de la navette. Il leur est impossible de réchapper à l'explosion. Les 3 RSS sont reliés entre eux. Si un RSS reçoit les deux signaux, il le transmet aux deux autres qui vont exploser aussi. Durant la phase ascensionnelle, une batterie alimente directement le RSS et la batterie pour la récupération (des boosters une fois dans l'océan) bascule alors sur le RSS pour l'alimenter à fond et permettre l'explosion. Mais, dès que la séparation des boosters est amorcée, on déconnecte les RSS des boosters et la batterie de récupération va reprendre son rôle normal, alimenter le déclenchement des parachutes, de l'émetteur radio et du flash pour retrouver les boosters dans la mer.
|