|
LE BRAS TELEMANIPULATEUR RMS
|
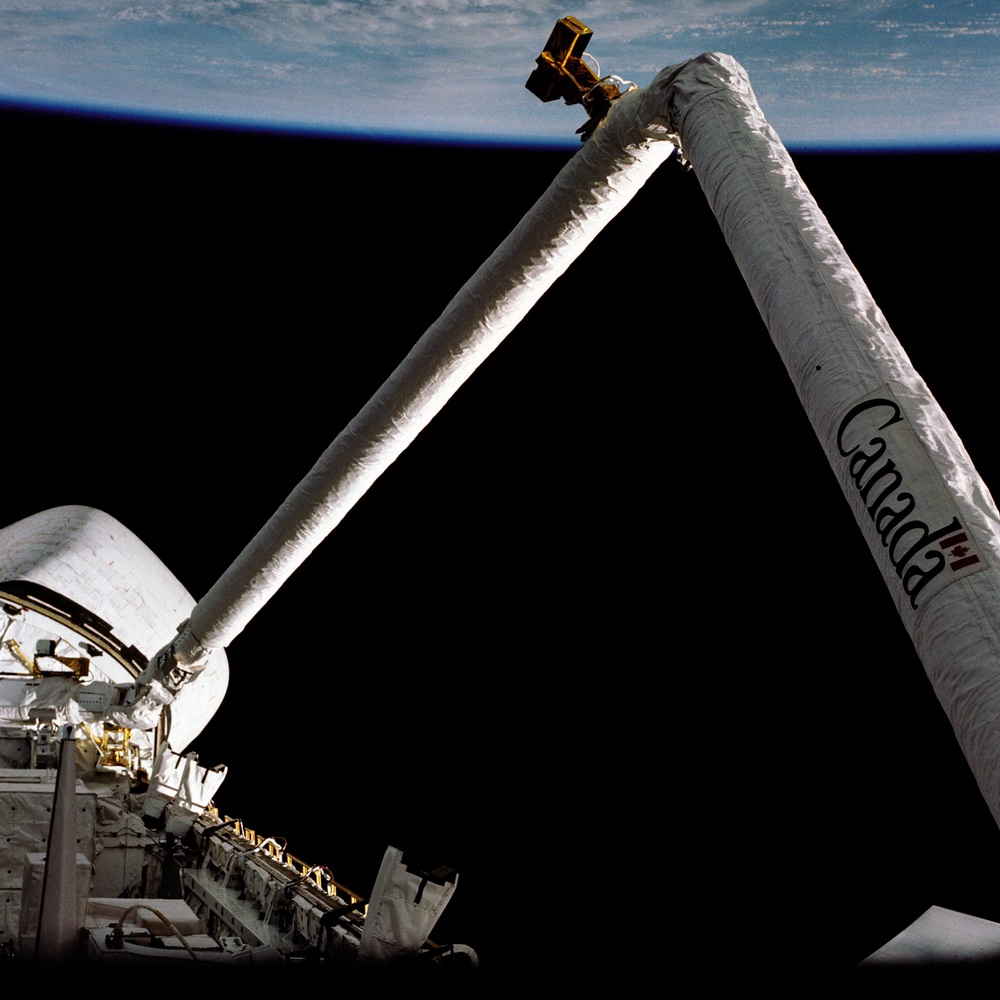
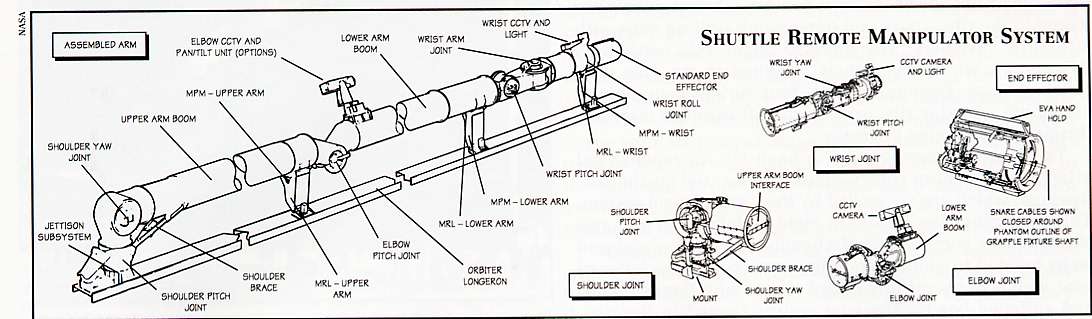
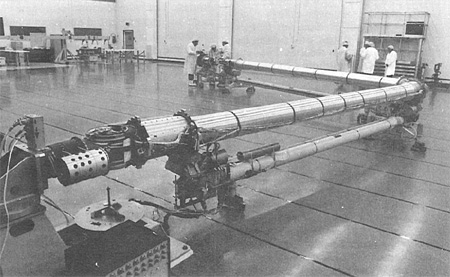
Le Shuttle étant appelé à réaliser de nombreuses opérations en orbite, mise à poste de satellites, réparation, assemblage de station orbitale, les américains l' ont doté d' un bras télémanipulateur ou bras robot le RMS, Remote Manipulator System. Le bras RMS Remote Manipulator System est normalement monté sur le longeron principal gauche du mur de la soute des Orbiters, L' épaule étant à l' avant du coté de la cabine. Long de 15, 3 m pour 35,7 cm de diamètre, il repose sur trois berceaux le long de la soute. Des aménagements avaient été prévus pour pouvoir le monter sur le longeron droit mais il aurait fallu enlever l' antenne Ku et cela n' a jamais été fait encore. Un seul bras à la fois peut être commandé depuis la cabine arrière, même si le câblage existe pour en commander deux.
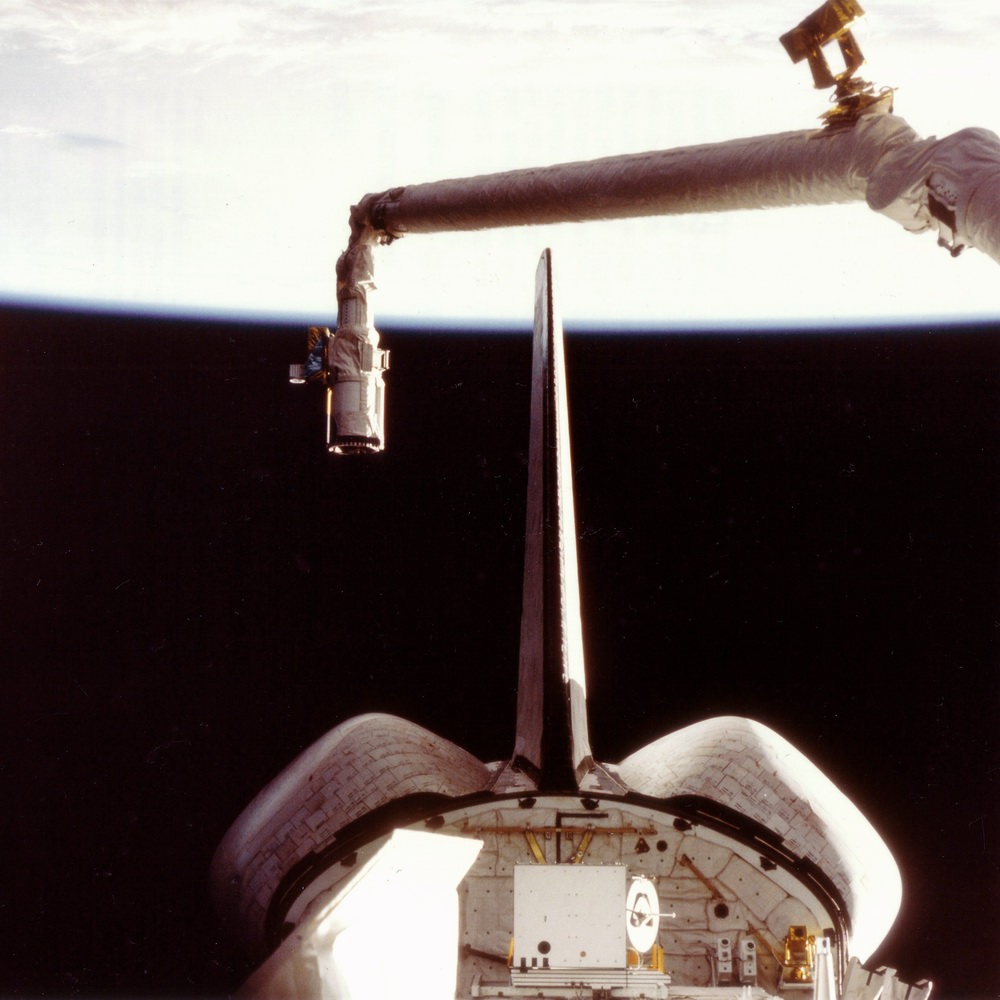
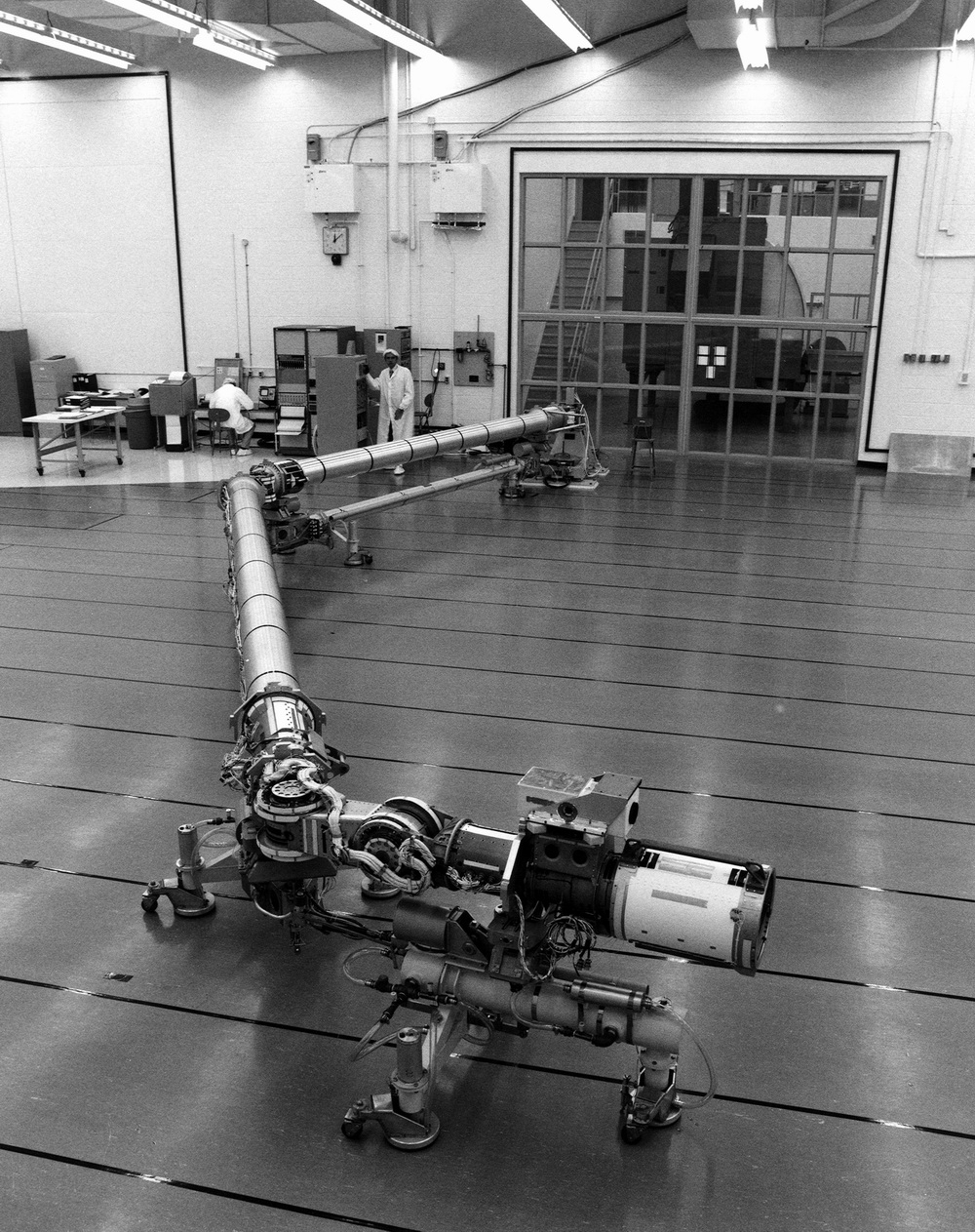
D' une masse de 411 kg sur terre (fibre de carbone fabriqué par General Dynamic), il est capable de déplacer dans l' espace des charges de 29 tonnes en gravité zéro. Mais il ne peut supporter son propre poids sur terre, pour le tester, il était posé au sol sur des roues. Equipé de caméras (une au niveau du coude et une autre sur le poignet), il est capable de déployer des charges utiles, de les rapatrier et de servir d' échelle pour les astronautes durant les sorties dans l' espace EVA. Enfin grâce à son extrême mobilité il peut aussi servir pour examiner les différentes parties de l' Orbiter. Le RMS a été dessiné et fabriqué par la firme canadienne Spar Aerospace, Ltd dans le cadre d' un accord NASA National Research Council of Canada. CAE Electronic à Montréal ayant fournit l' électronique. Le dessin du bras reprend le bras humain avec une épaule, un coude et un poignée avec seulement 6 degrés de liberté (comparé au 30 de notre bras) permettant divers mouvements: _ Tangage de l' épaule entre +145° et -2°
(+142,4° à +0,6°) par rapport à un axe de référence horizontal constituant la paroi de la
soute. Le système de base comprend le bras proprement dit et les éléments associés comme le panneau de contrôle et de commande à l' arrière de la cabine de pilotage et les unités d' interface avec les ordinateurs (528 kg). Un système complet de TV en circuit fermé (fournit par RCA Astro Electronics) permet de visualiser les opérations grâce à des caméras couleur et NB disposées dans la soute et sur le bras. Ces vidéo destinées essentiellement au public sont vues depuis la cabine par deux écrans TV noir et blanc. Elles peuvent soit être enregistrer sur des magnétoscopes soit être retransmis au sol par des antennes en bandes S ou Ku. Pour assembler la station ISS, les quatre RMS en service ont été amélioré depuis 1998 et sont maintenant capable de déplacer des charges de 200 tonnes.
Détail technique du bras RMS
C' est en 1969 que la NASA invite le Canada à
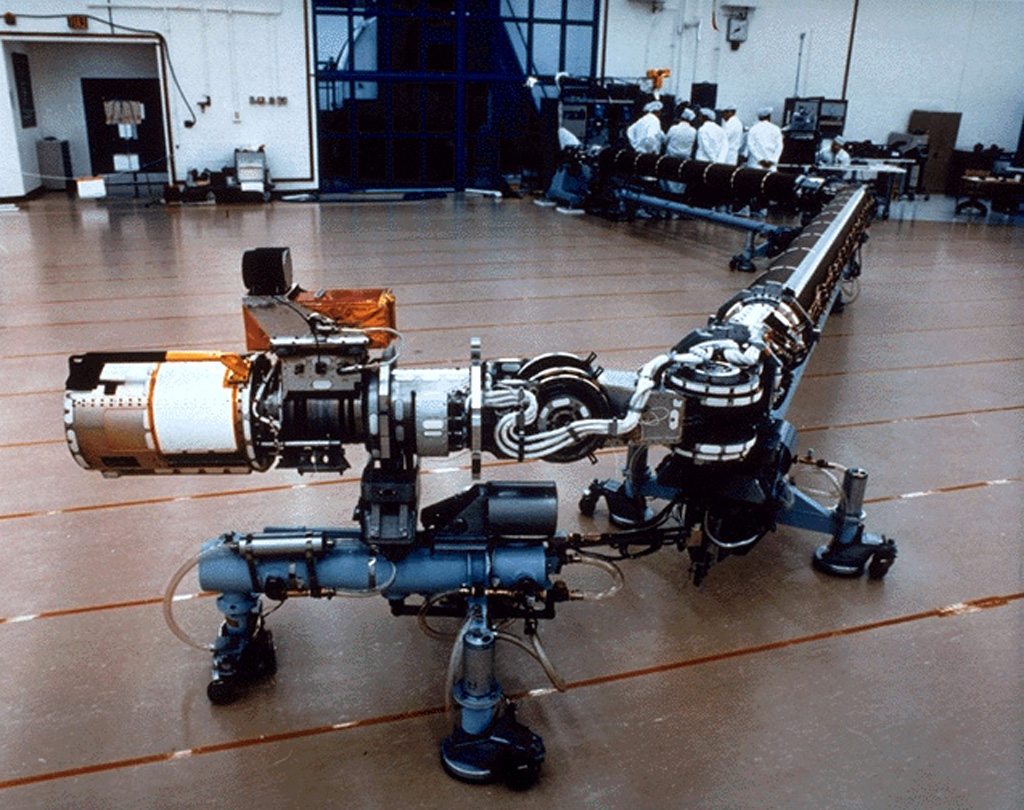
participer au développement du programme Shuttle. Par le biais de ce contrat, les canadiens s' offrent ainsi un ticket pour l' espace, une participation active au Shuttle et une ouverture vers des applications en robotique. En juillet 1975 le contrat est signé avec le National Coucil (futur agence spatiale Canadienne CSA). Le Canadarm est à l' image du bras humain avec des nerfs en cuivre, des os en tube de graphite et des moteurs en guise de muscles. Les moteurs actionnant le bras sont alimentés en courant continu et sont aussi gros qu' un combinée téléphonique et permettent des mouvements d' une extrême précision. Chargé, le bras peut se déplacer à 70 cm/ s et chargé avec 30 tonnes de matériel, la vitesse tombe à 5 m/ s. Pour construire le Canadarm, les ingénieurs sont
partis de zéro. Afin de satisfaire le cahier des charges de la NASA, raideur,
masse, tolérance de température il a fallu tout inventer.
Le Canadarm étant à l' image du bras humain, il a fallu développer un système de commande en cabine très sophistiqué afin de retranscrire au mieux les mouvements grâce à un "joystick" et un système de contrôle par écran TV. Les travaux sur le premier bras se termine en février 1981 avec la livraison par camion du premier bras, le 201 à la NASA pour un coût de 108 millions $. Intégré sur Columbia en juin, il vole en novembre lors de la mission STS 2.
Cinq bras ont été construit par Spar à Toronto et livré en avril 1981, janvier 1983, décembre 1983, mars 1985 et août 1993, ce dernier remplaçant le bras de Challenger détruit le 28 janvier 1986. UTILISATION CHRONOLOGIE
Le 30 juillet 1997, le bras 303 a été envoyé au KSC en provenance de Spar Robotics Facility. Ce bras récemment mis à jour pour la construction de la station ISS a été un élément critique dans la réparation du télescope Huble en décembre 1993. Actuellement Spar a amélioré deux des quatre bras en service au KSC
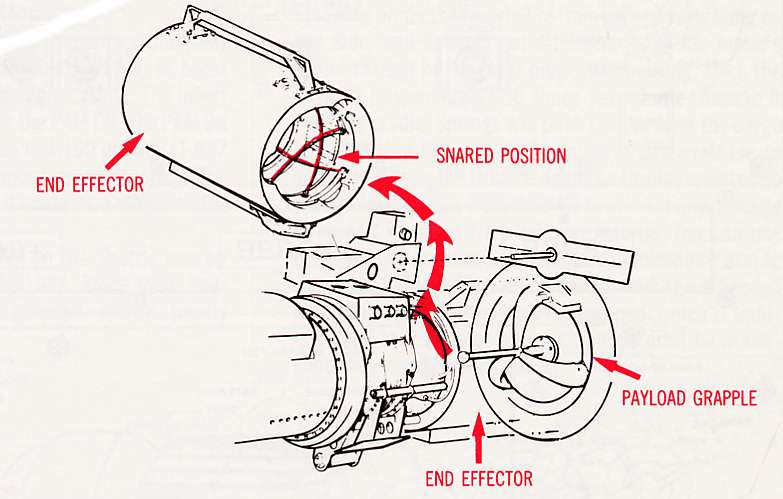
Le futur du RMS est le Space Station RMS destiné à la station internationale ISS qui sera mis en place en 2001 par la navette avec à son bord un astronaute Canadien Chris Hadfield. Ce nouveau bras peut se déplacer à l' image d' un ver de terre. Il est équipé à chaque extrémité d' un système de capture appelé Latching End Effector (LEE) qui peut venir s' attacher sur un autre structure le Power Data Grapple Fixtures (PDGF). En se détachant d' une extrémité, le bras peut ainsi se déplacer le long de la station dans un large rayon en fonction des structures PDGF installées. Comme le RMS, le SSRMS est équipé de quatre caméras TV permettant une vue d' ensemble ou de détail. deux jeux sont installés sur les tubes, un autre sur les coudes et le reste sur les LEE de cahque coté. Photos NASA, CSA et Dennis Jenkins
|