|
ANNEXE 6
|
CONSTITUTION GENERALE DU
SPACELAB,
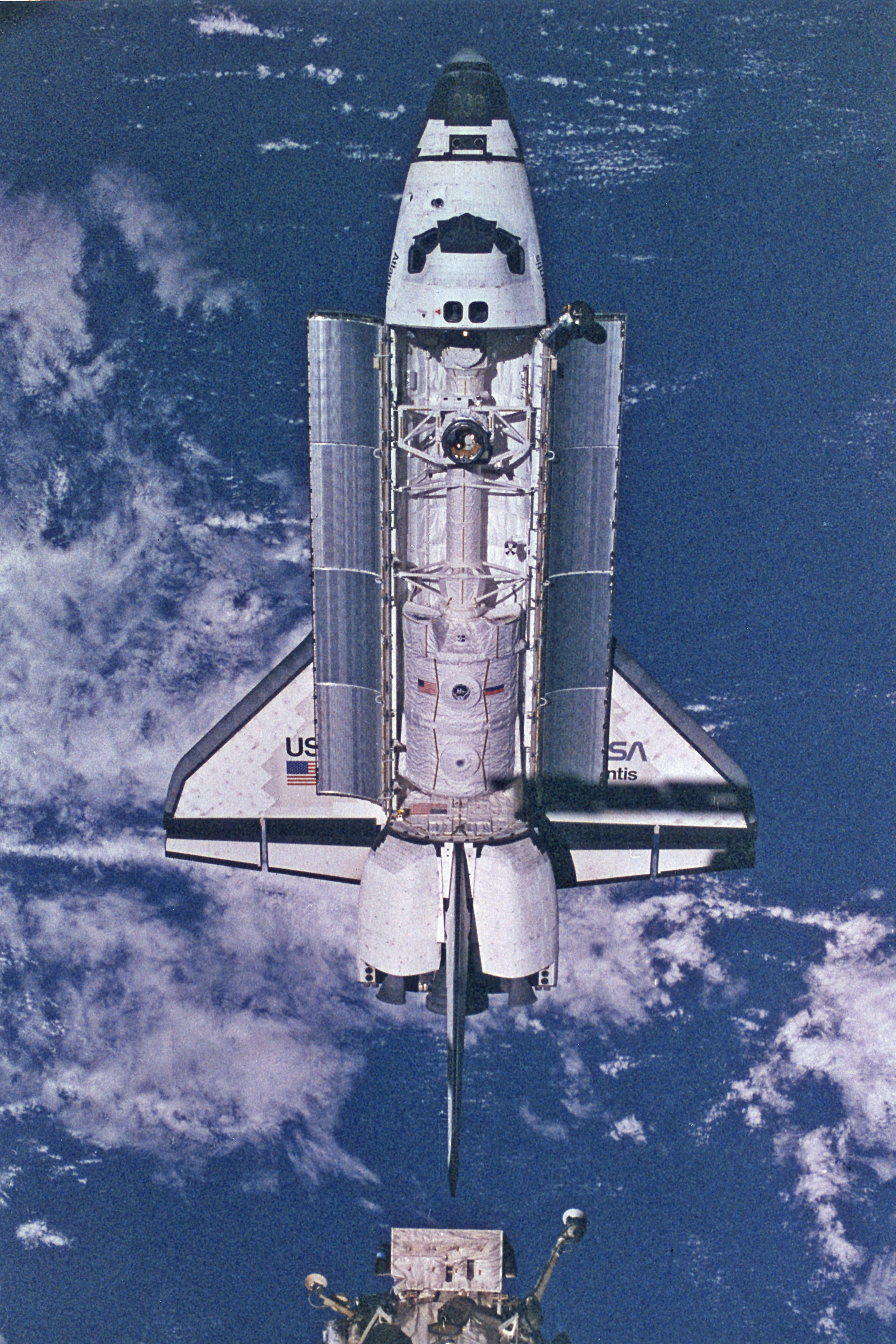
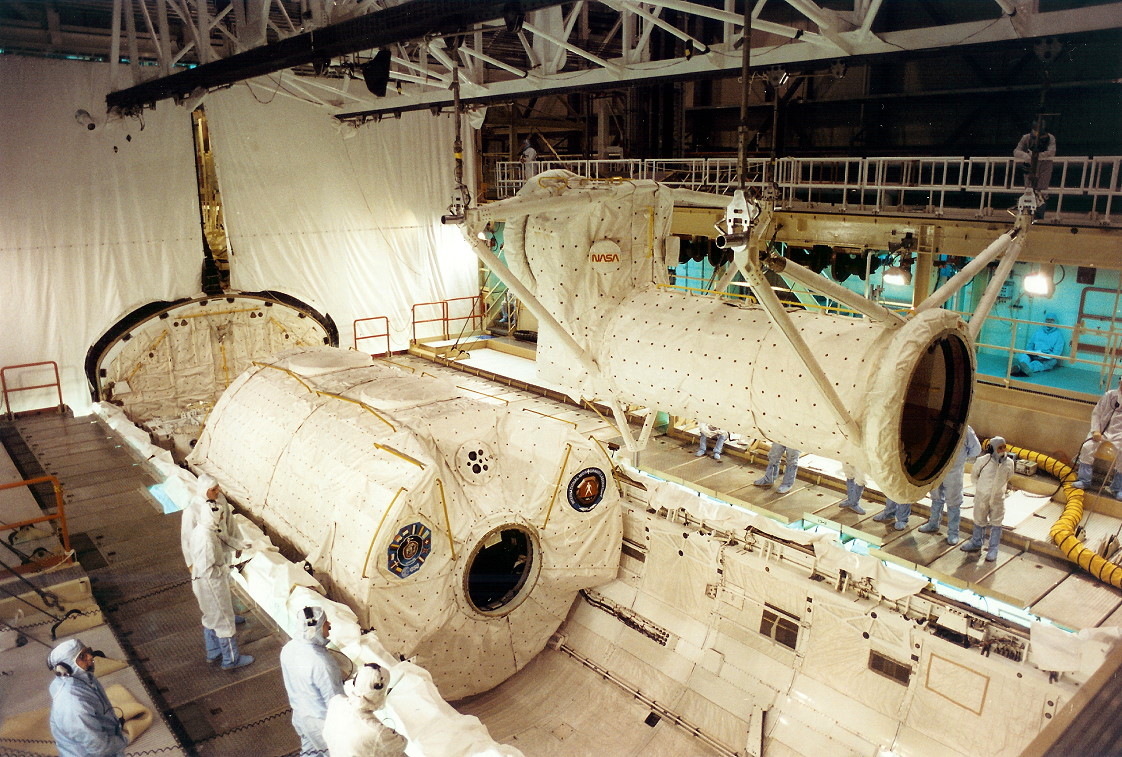
Les seules vues du Spacelab dans la soute de l'Orbiter dans l'espace sont prises par l'équipage de la station spatiale russe MIR 1 à laquelle Atlantis va s'amarrer en juin 1995 lors de la mission STS 71. Le Spacelab est en configuration module long,
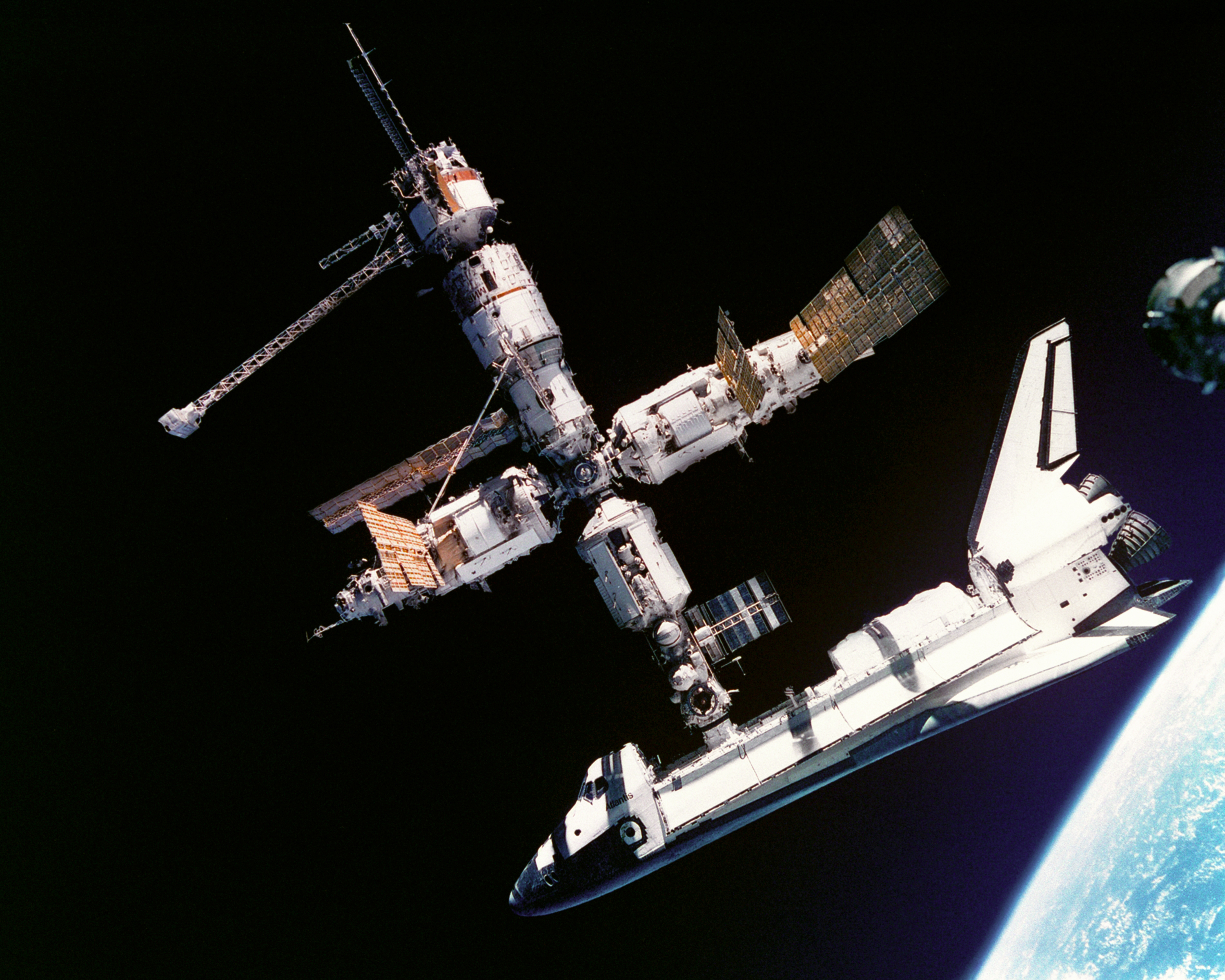
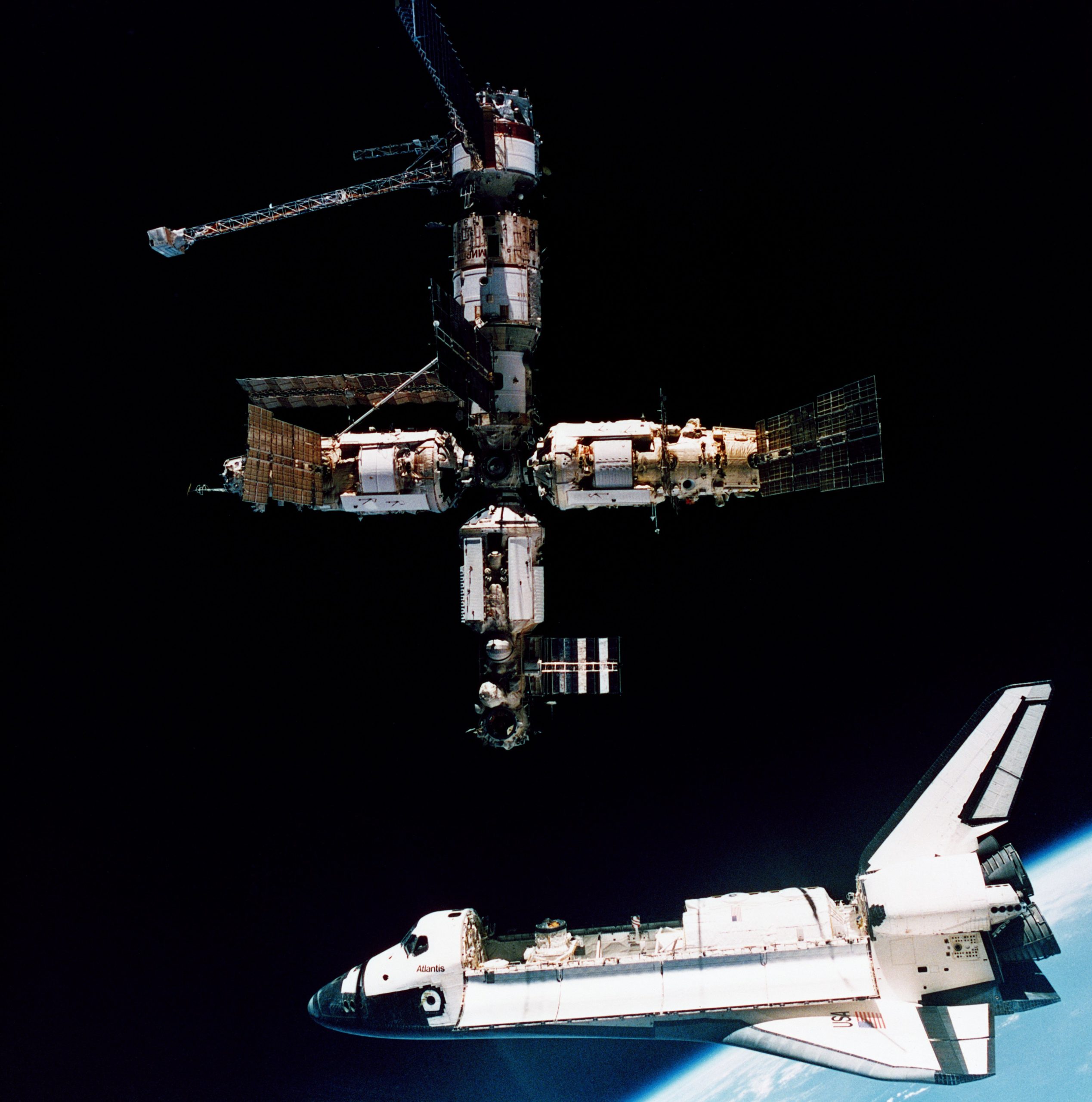
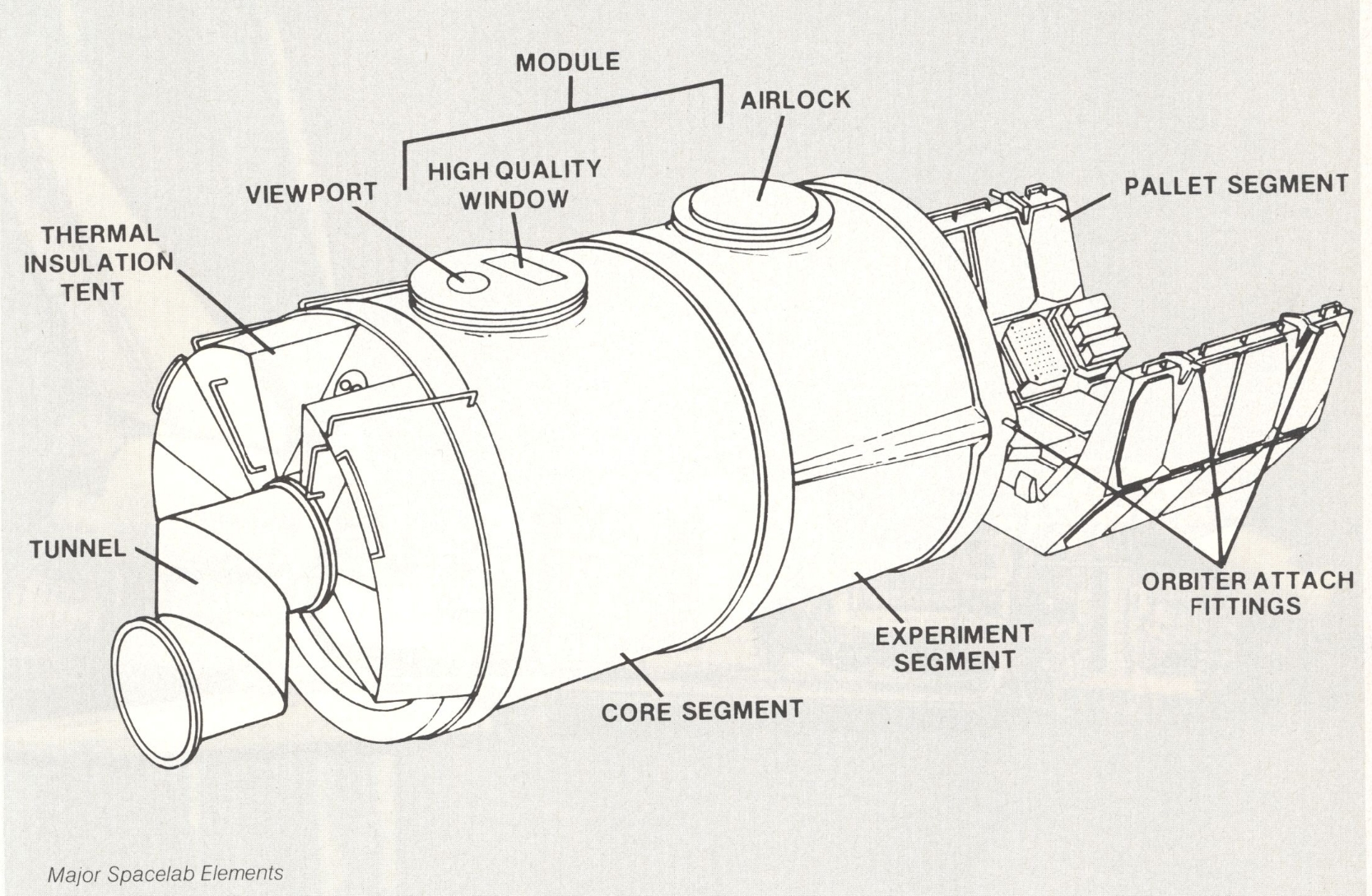
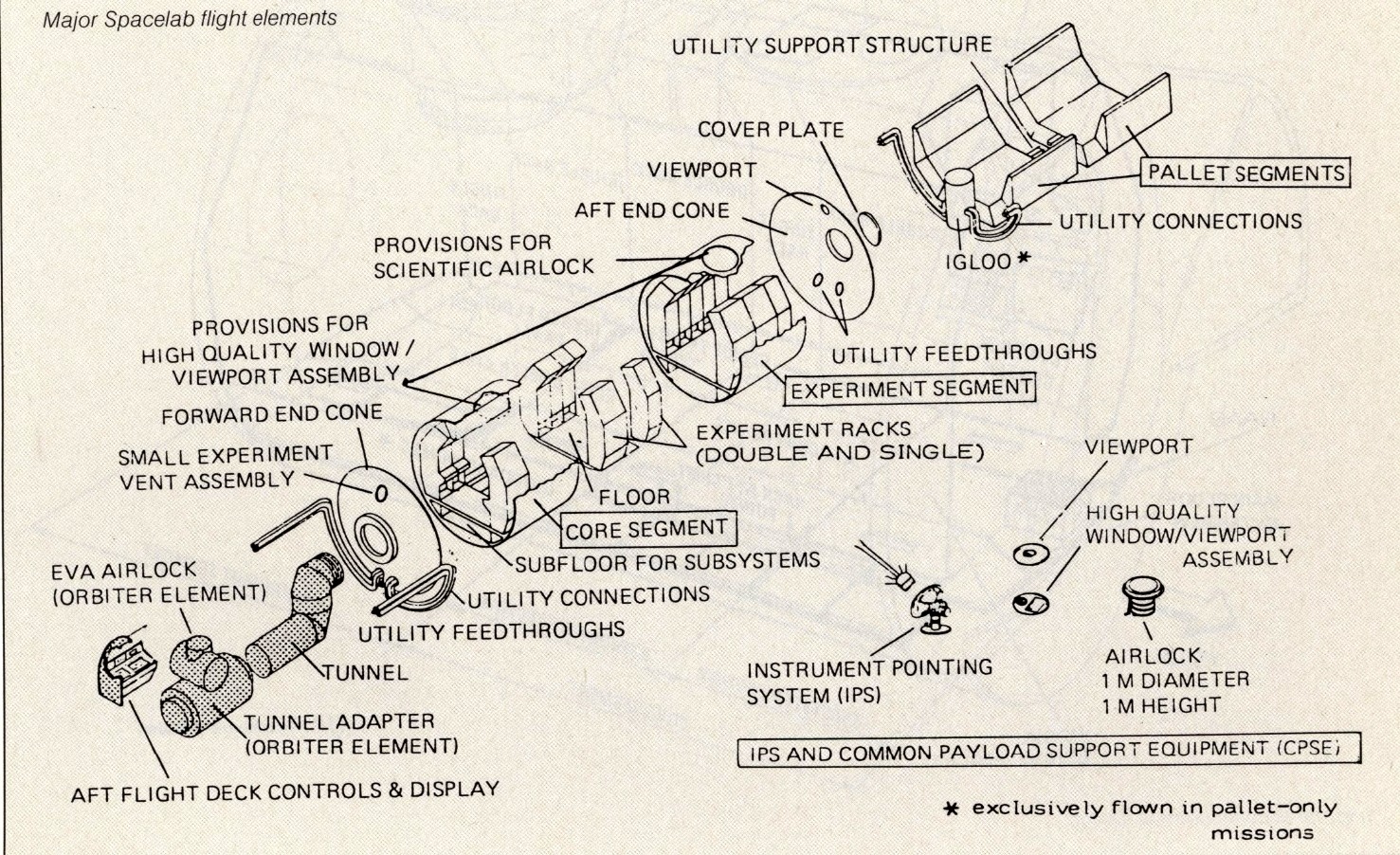
STS71, Atlantis se sépare de MIR, photographié par l'équipage MIR19 du Soyouz TM21, Solyvyev et Budarin, le 4 juillet 1995 CONFIGURATIONS Le Spacelab, laboratoire de l'espace est constitué de 2 éléments principaux, logés dans la soute de l'Orbiter, le module pressurisé habité et les palettes extérieures. Le module est relié au compartiment habitable de l'Orbiter par un tunnel. Le module est configuré à l'intérieur pour recevoir les appareils et les expériences dans des racks standards. Les palettes à l'extérieur sont exposées au vide spatial. Sont associé à ces palettes, l'Igloo, une structure cylindrique abritant, en configuration palettes seules, les équipements du sous système et l'IPS, le système de pointage nécessaire pour les télescopes par exemple.
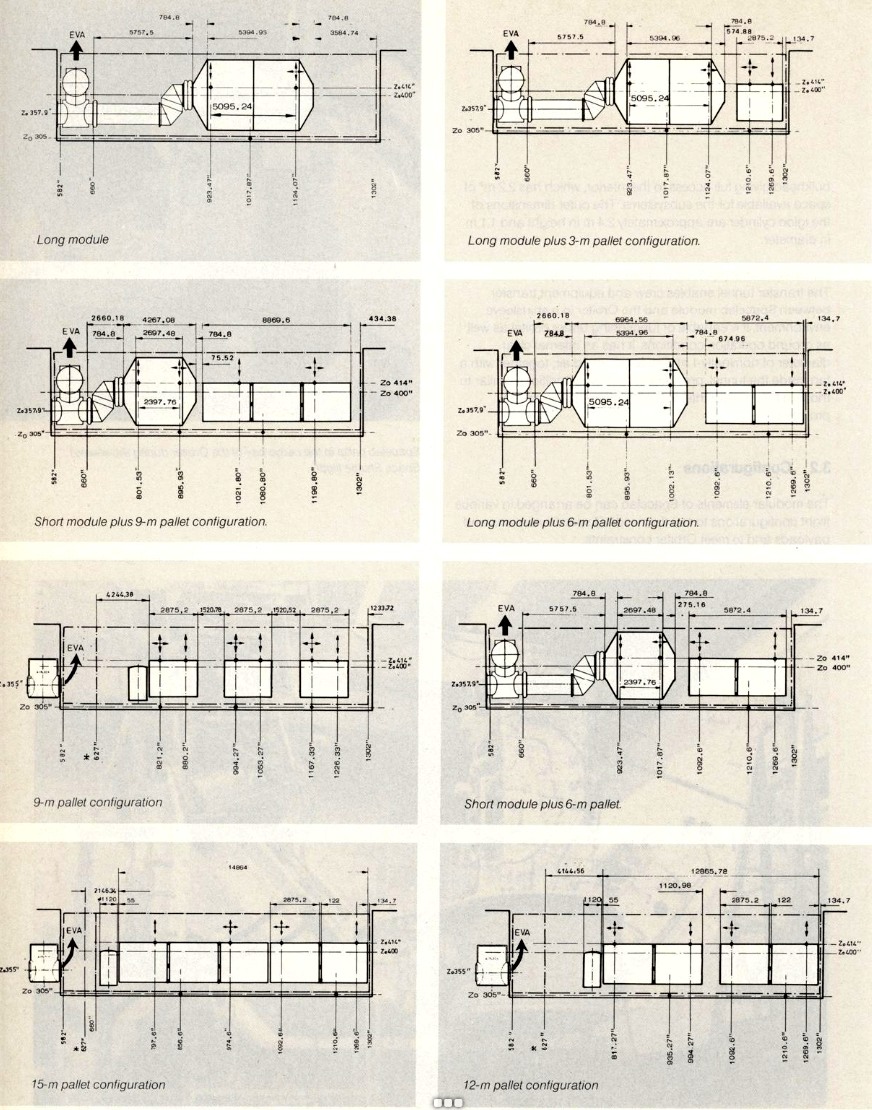
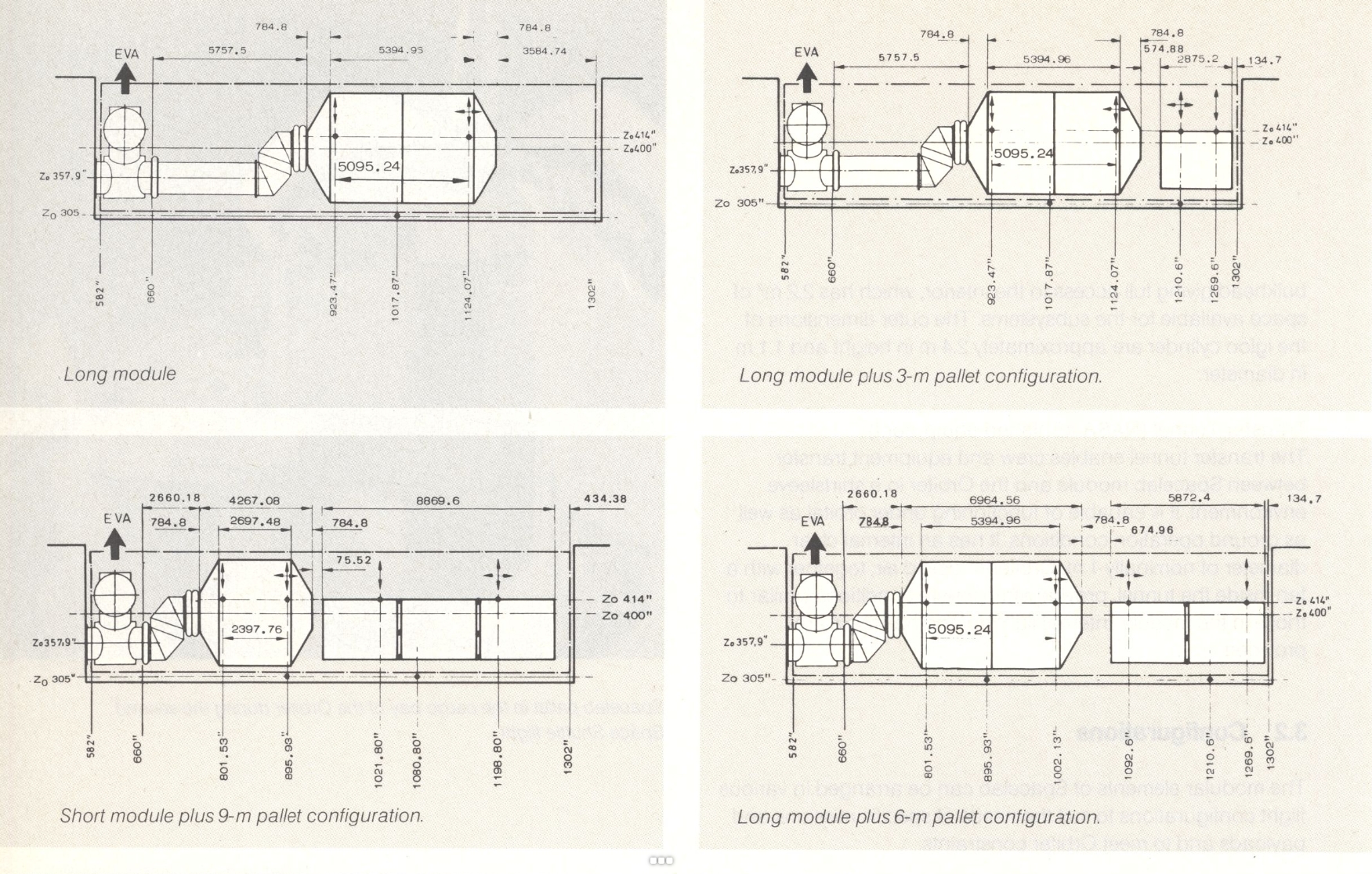
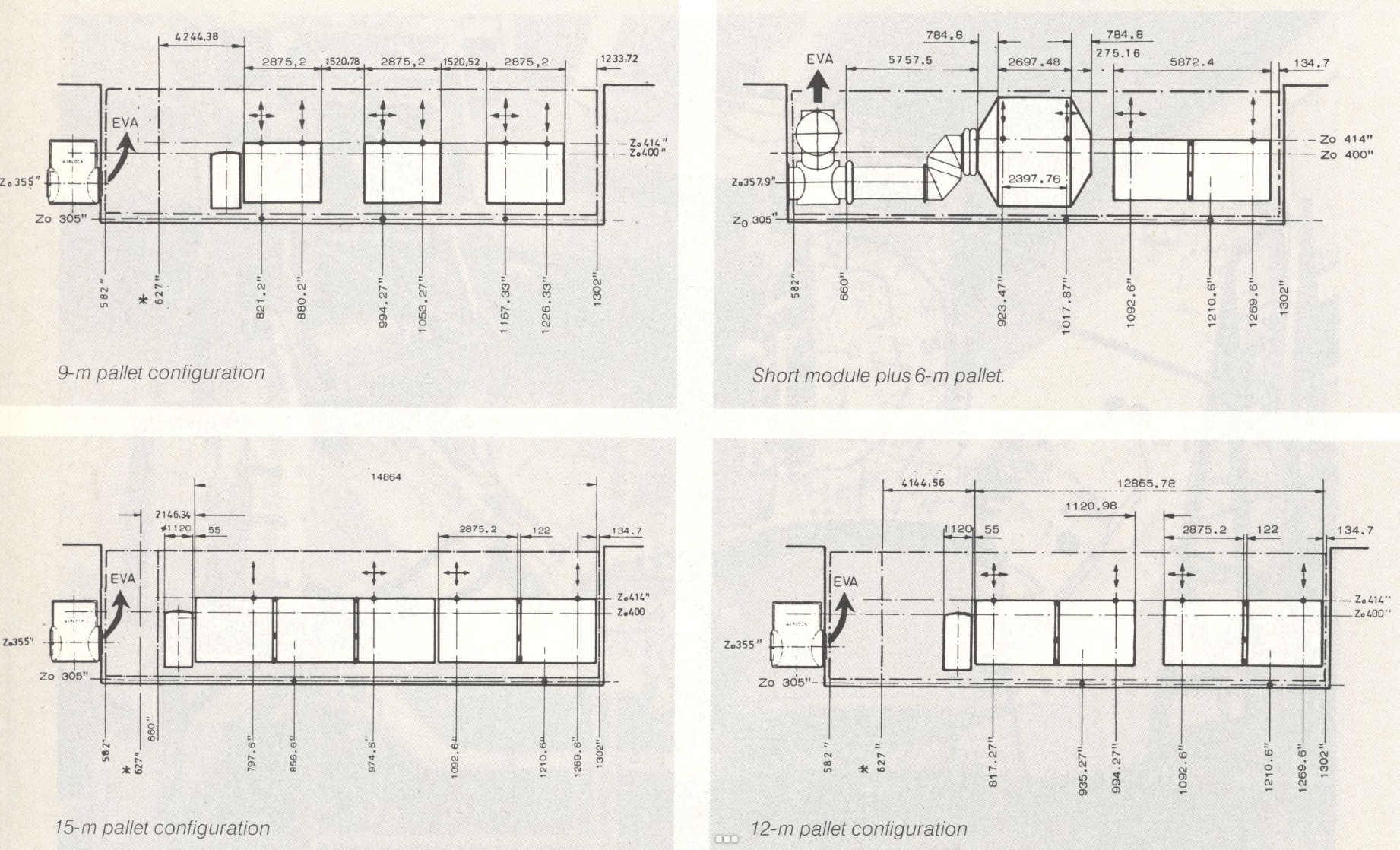
Le Spacelab peut voler en 8 configurations de vol, dont 4 de base : _
Module long, 7,2 m.
Configuration 1 à 4 et 5 à 8 pour le Spacelab. Seules les configurations avec modules long voleront dans l'espace, soit seul, dans la majorité des cas, soit associé à une palette (SL1) ou un train de 3 palettes dans la soute (Spacelab 2). LES MODULES
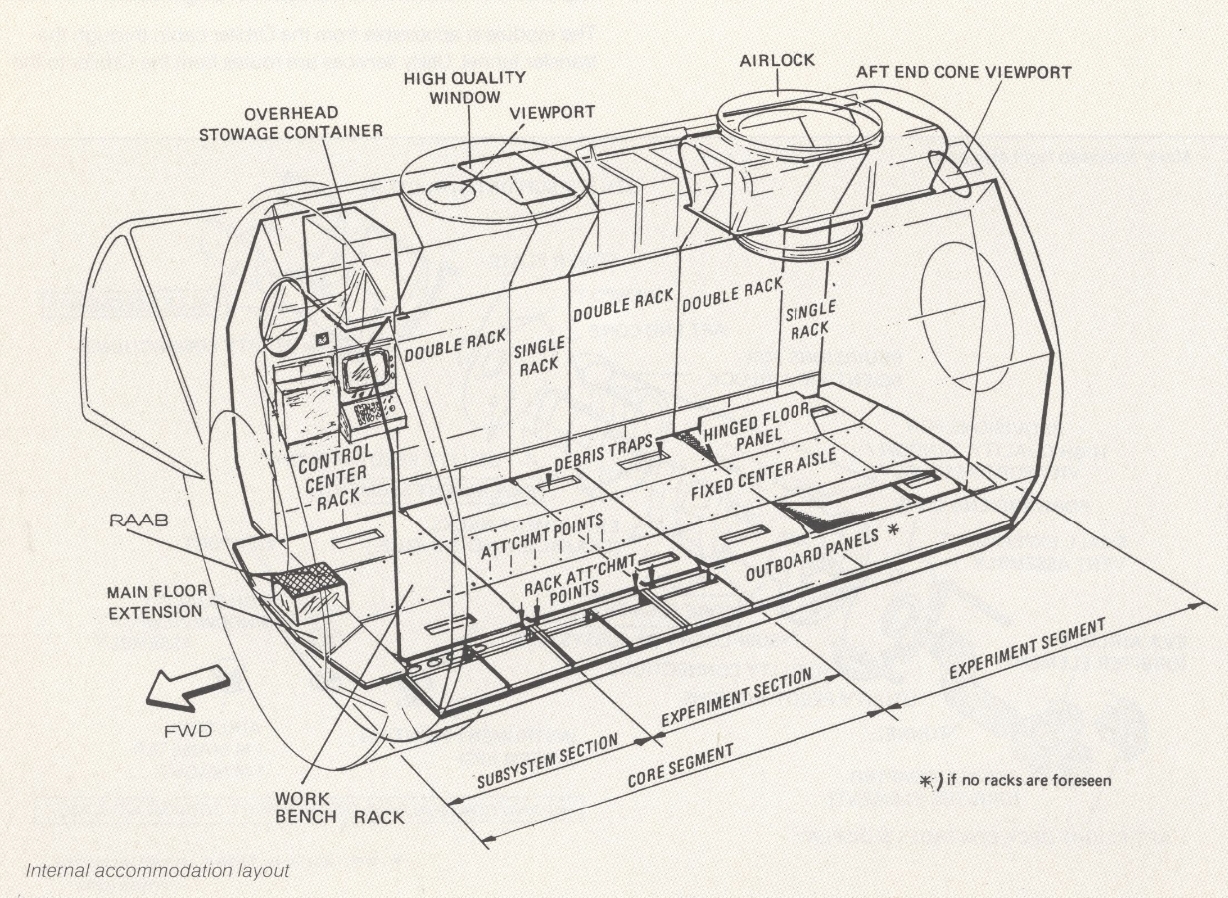
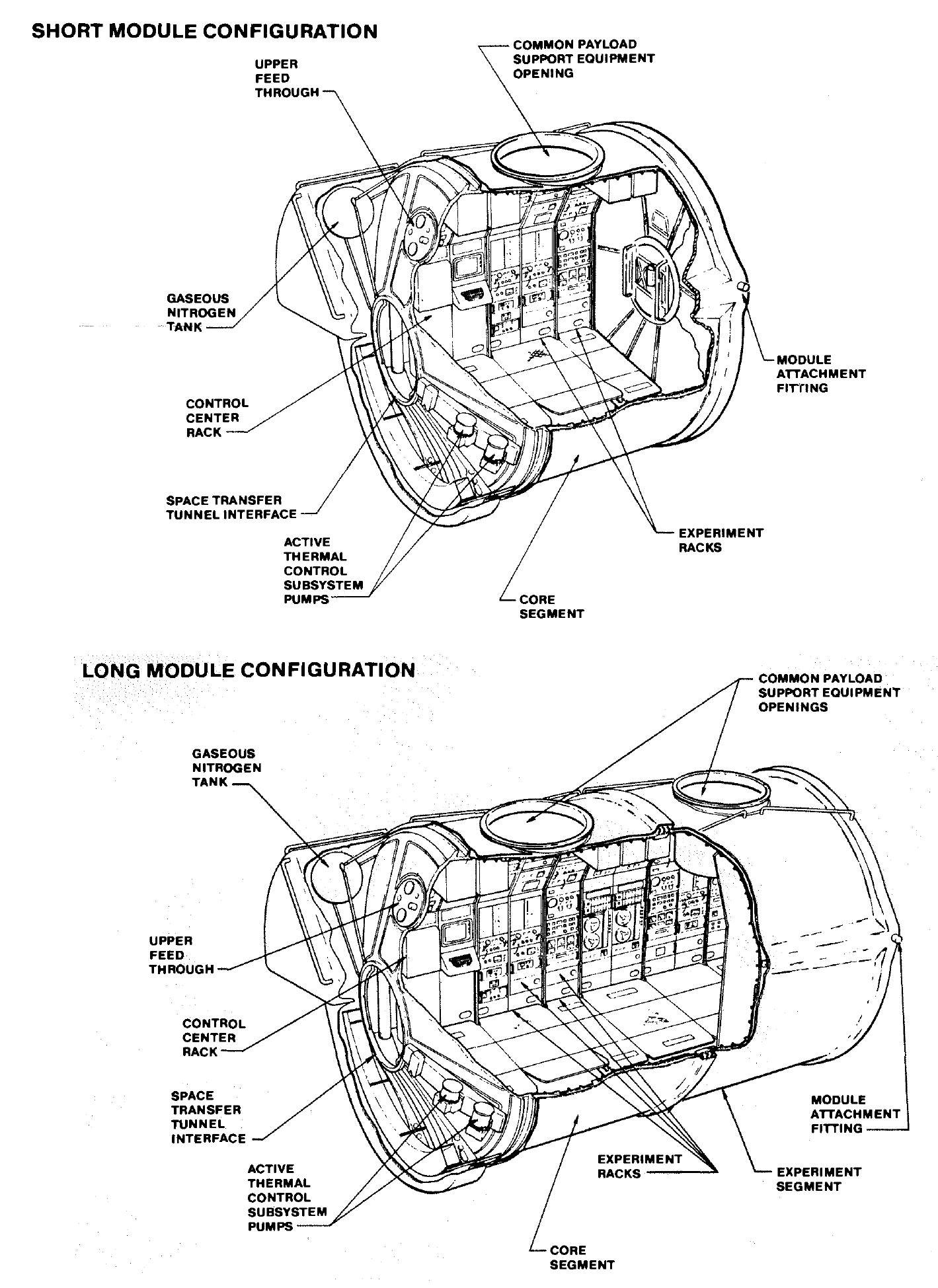
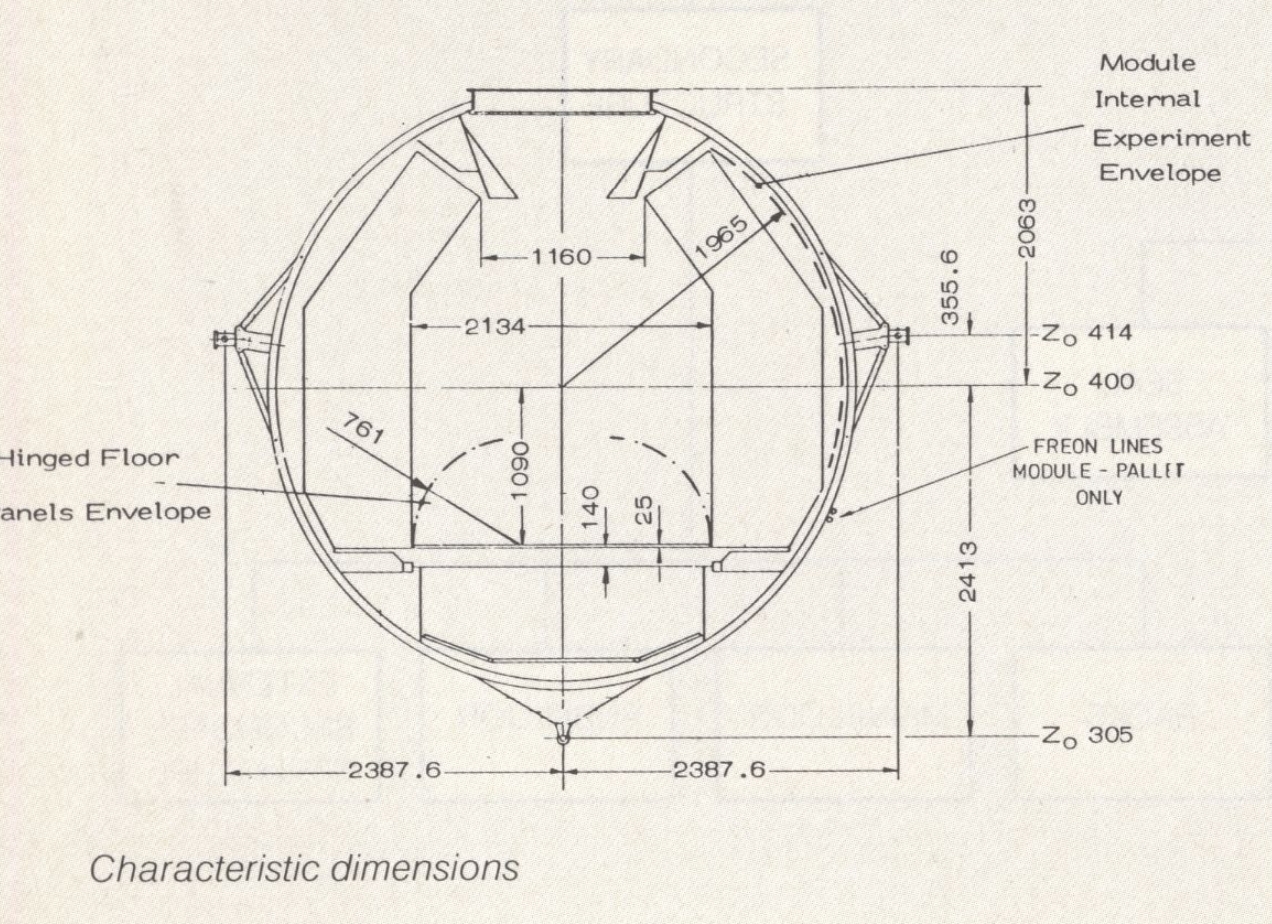
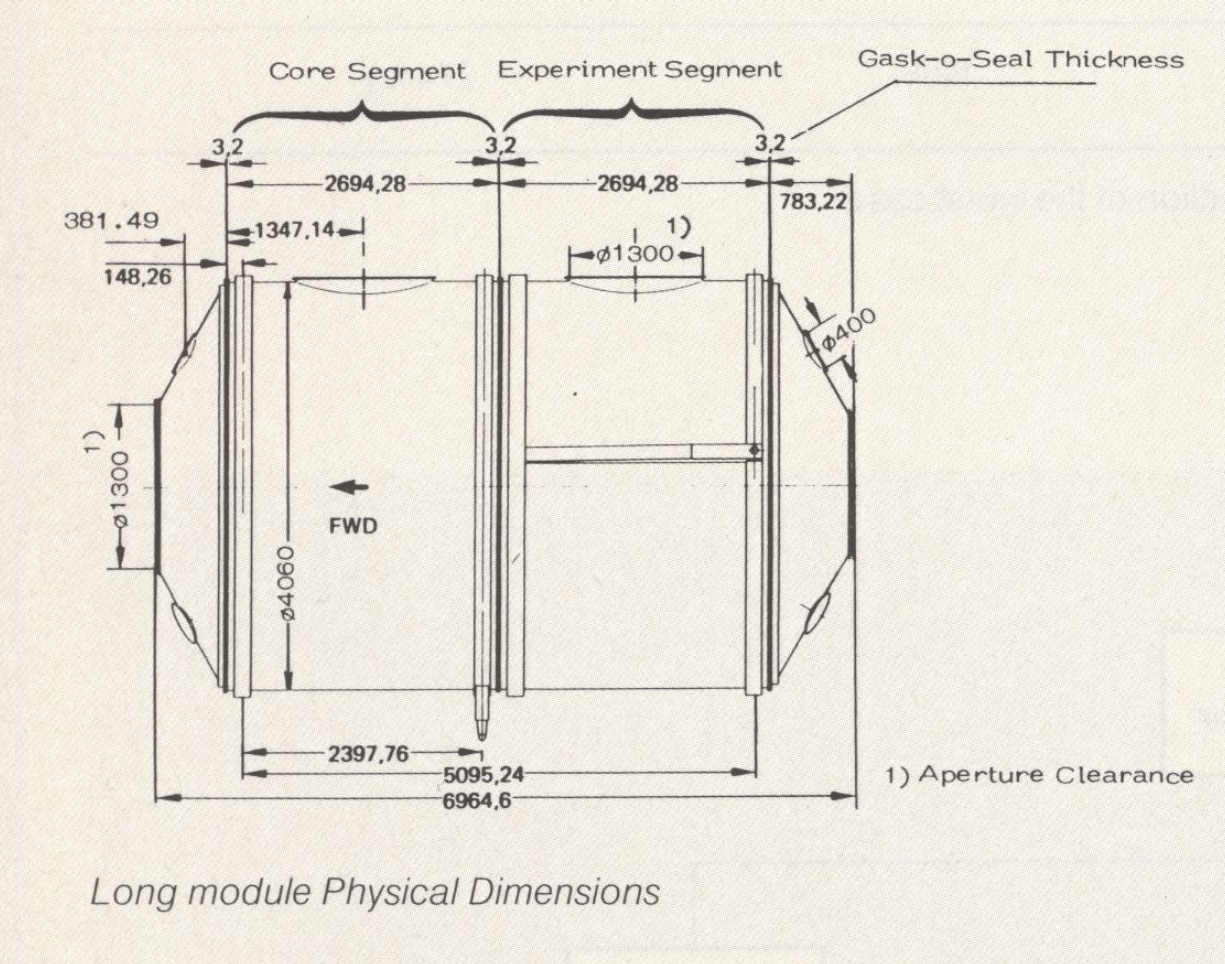
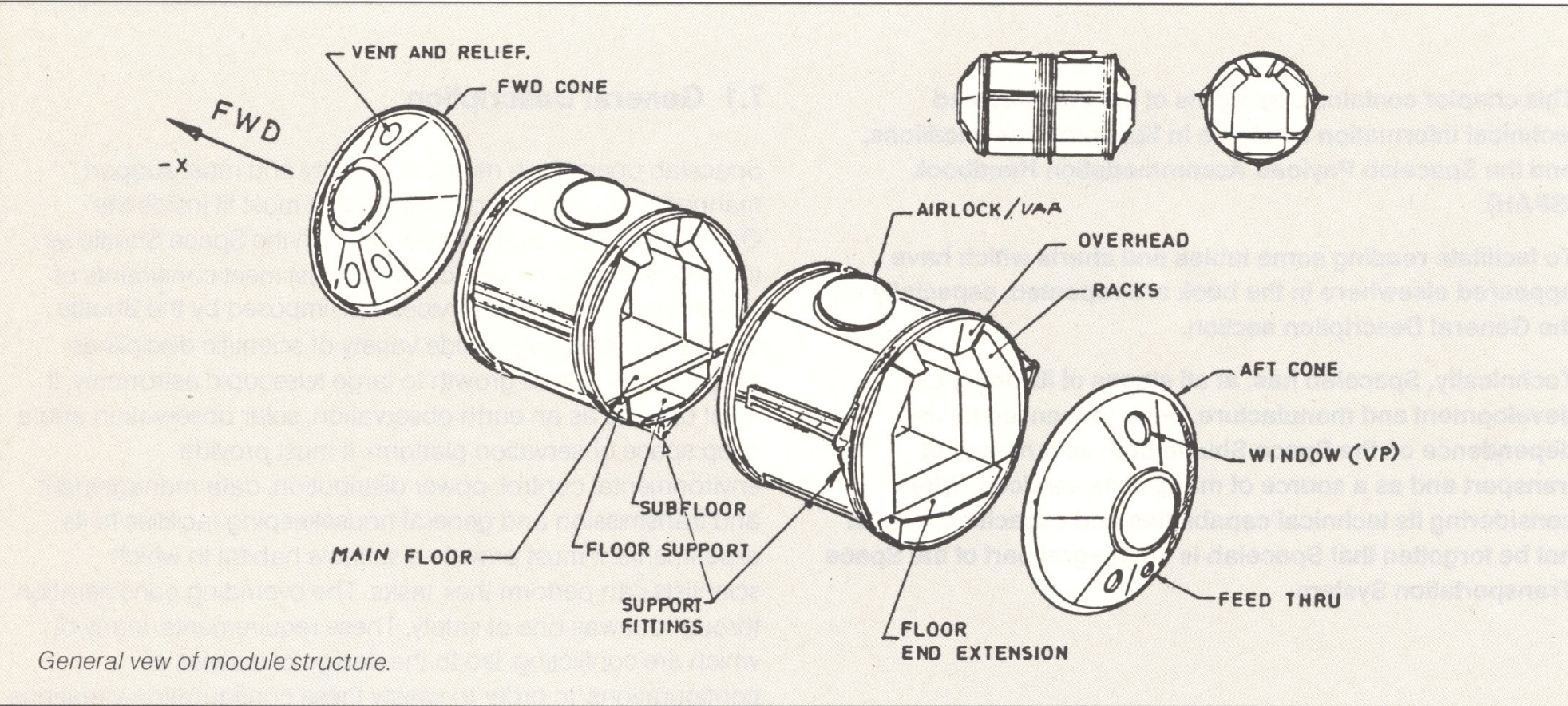
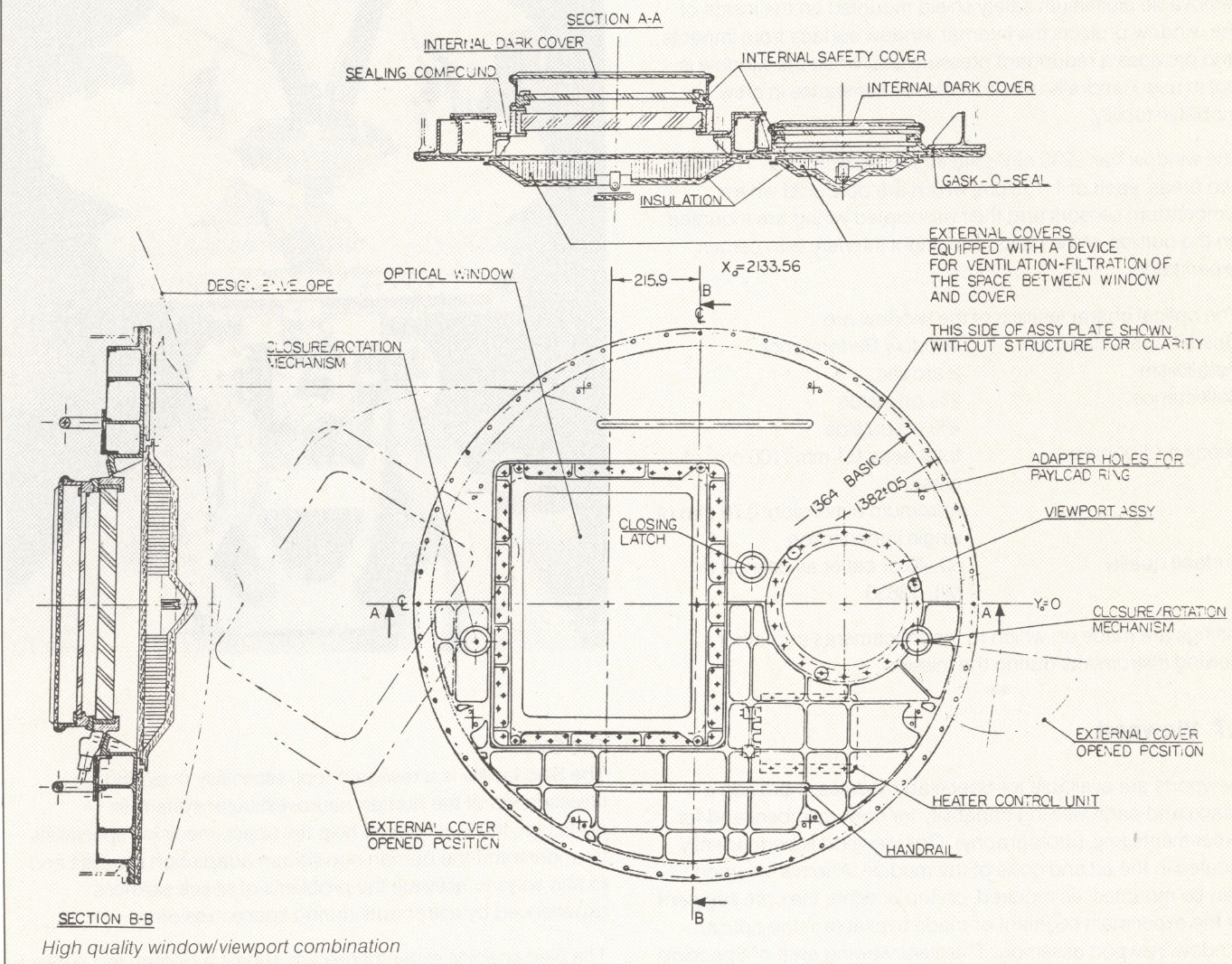
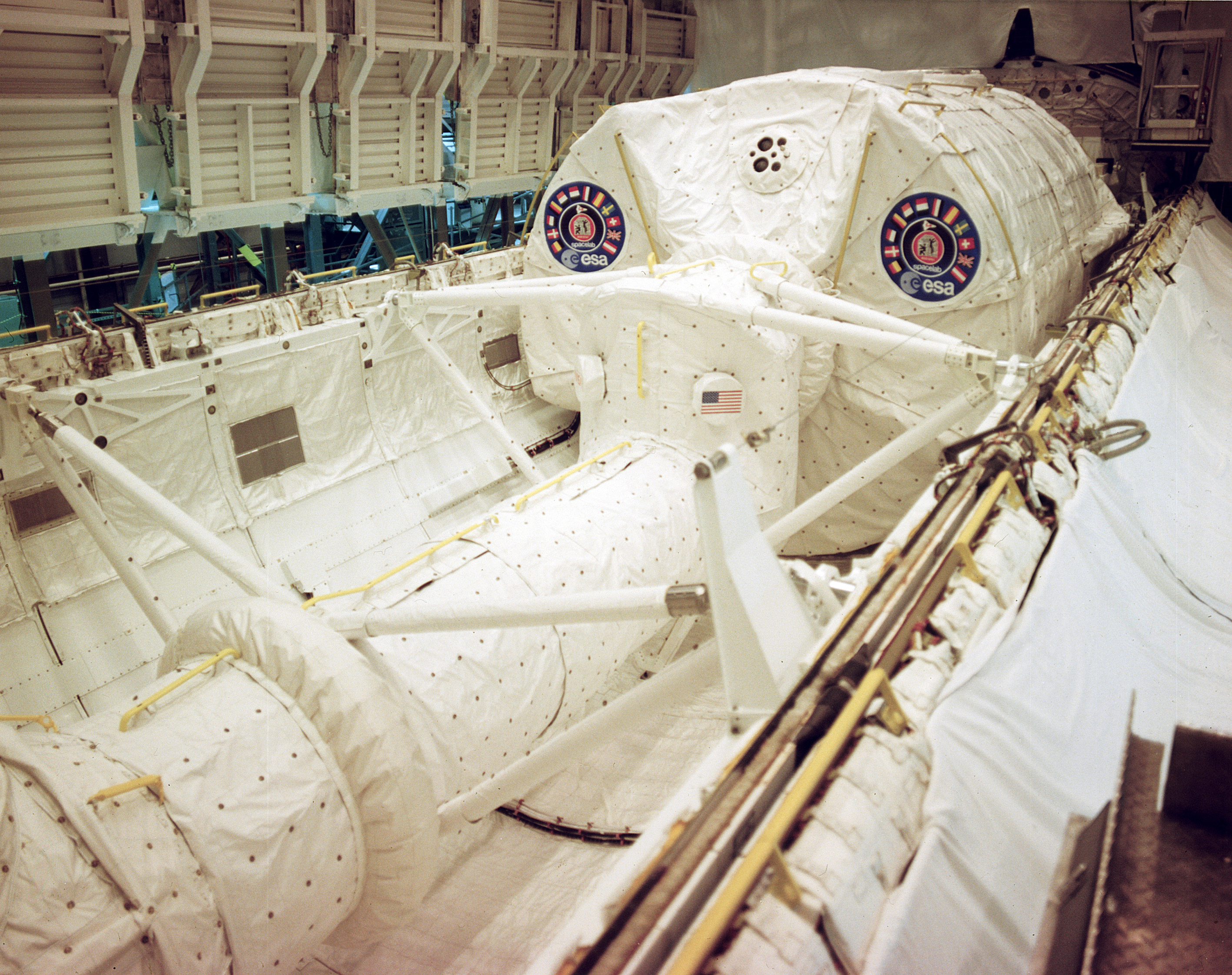
Le module pressurisé est constitué d' une combinaison d' un ou deux segments cylindriques, chacun de 4 m de diamètre et 2,7 m de long. Il est fermé de chaque coté par des sections coniques appelées " cône final ". La première configuration, module court est constituée d' un segment et de deux cônes. Avec deux segments, un principal, l' autre pour les expériences et deux cônes, on constitue le module long. L' entrée dans le module se fait à partir de la cabine de l' Orbiter par un tunnel de liaison qui l' alimente en énergie, eau, oxygène. Toutes les configurations de vol contiennent les mêmes arrangement intérieurs. Le sous système essentiel est installé dans le premier double " rack " sur chaque coté et sous le plancher du segment principal. Le reste de l' espace des " racks " du segment principal et de tous les " racks " du segment expérience peuvent être utiliser pour les expériences. Chaque segment est équipé au plafond d' un container de 1,3 m de diamètre intérieur destiné au logement du CPSE, l' équipement support de charge commune à savoir le haut du sas pour le segment expérience ou l' ensemble adaptateur hublot ou la fenêtre haute qualité/ l' ensemble hublot. Quand les hublots ne sont pas utilisés, il sont obturés par des couvercles plats. Le hublot de derrière donne une vue complète des palettes dans la soute.
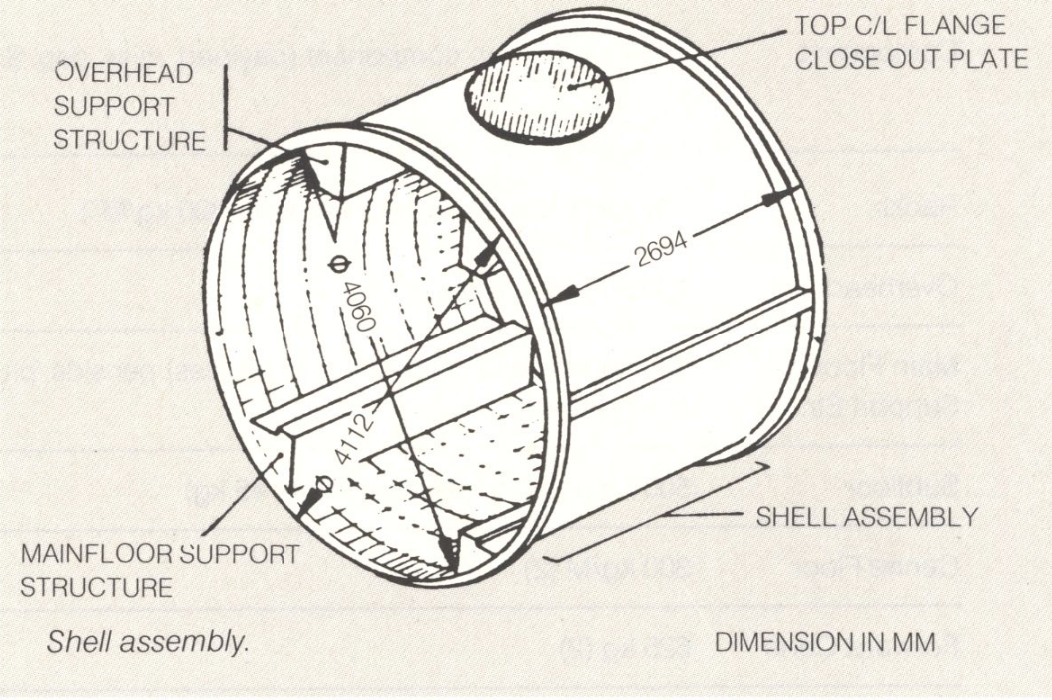
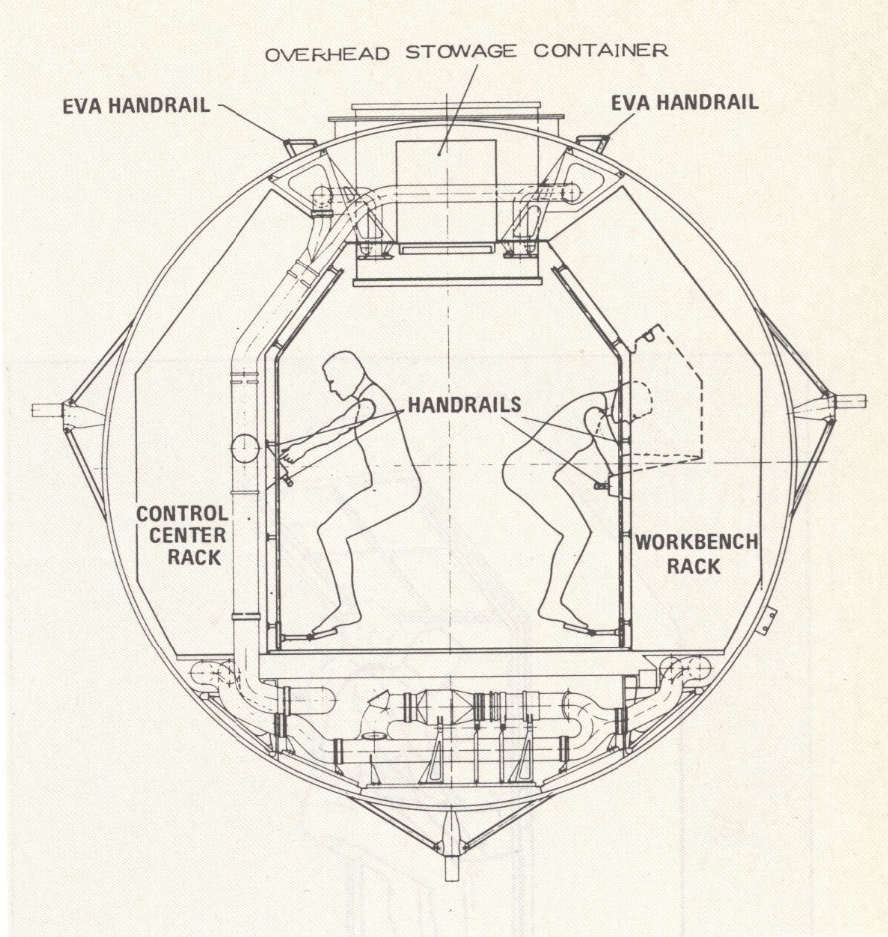
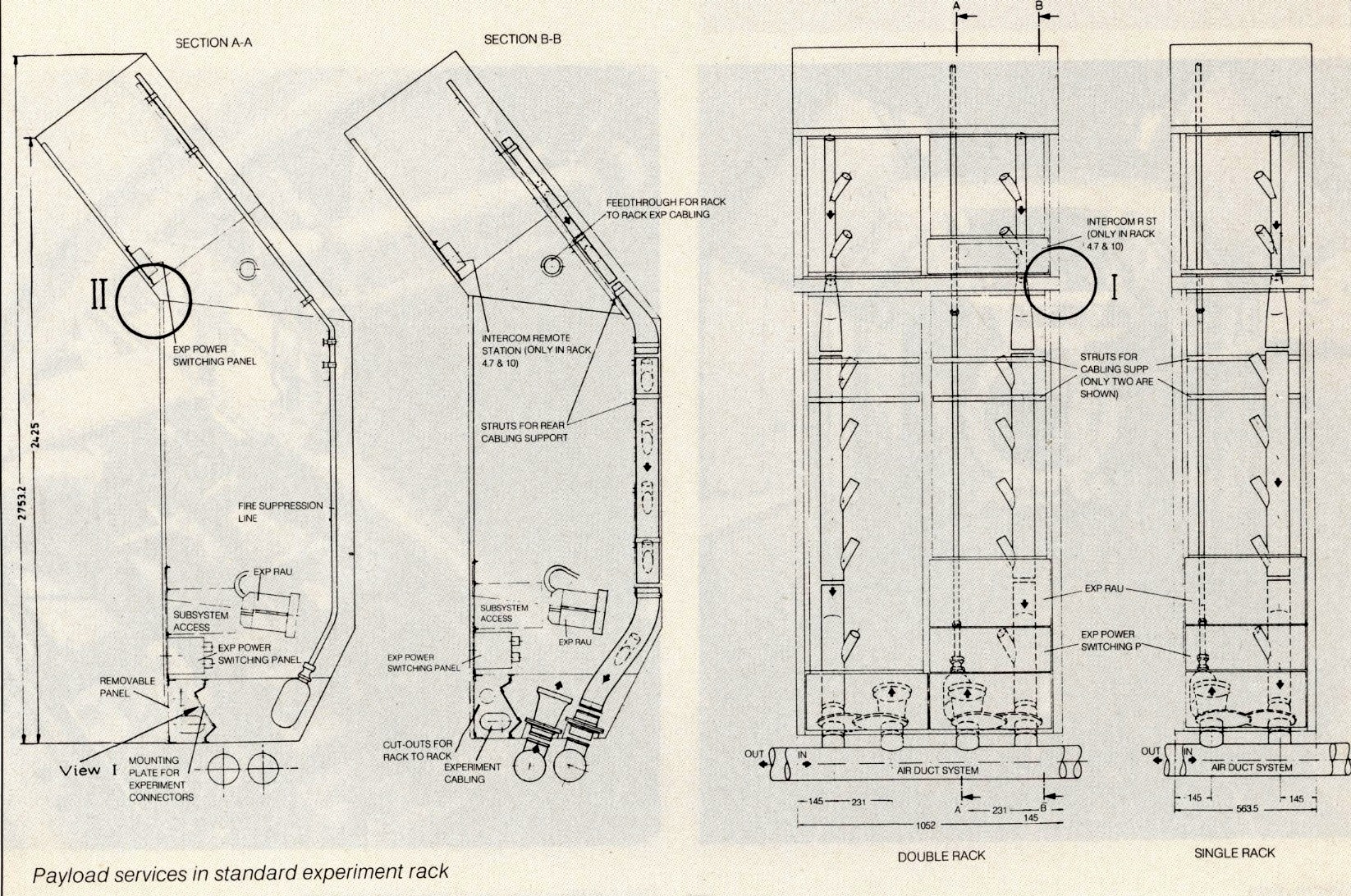
STRUCTURE DE LOGEMENT DU MODULE
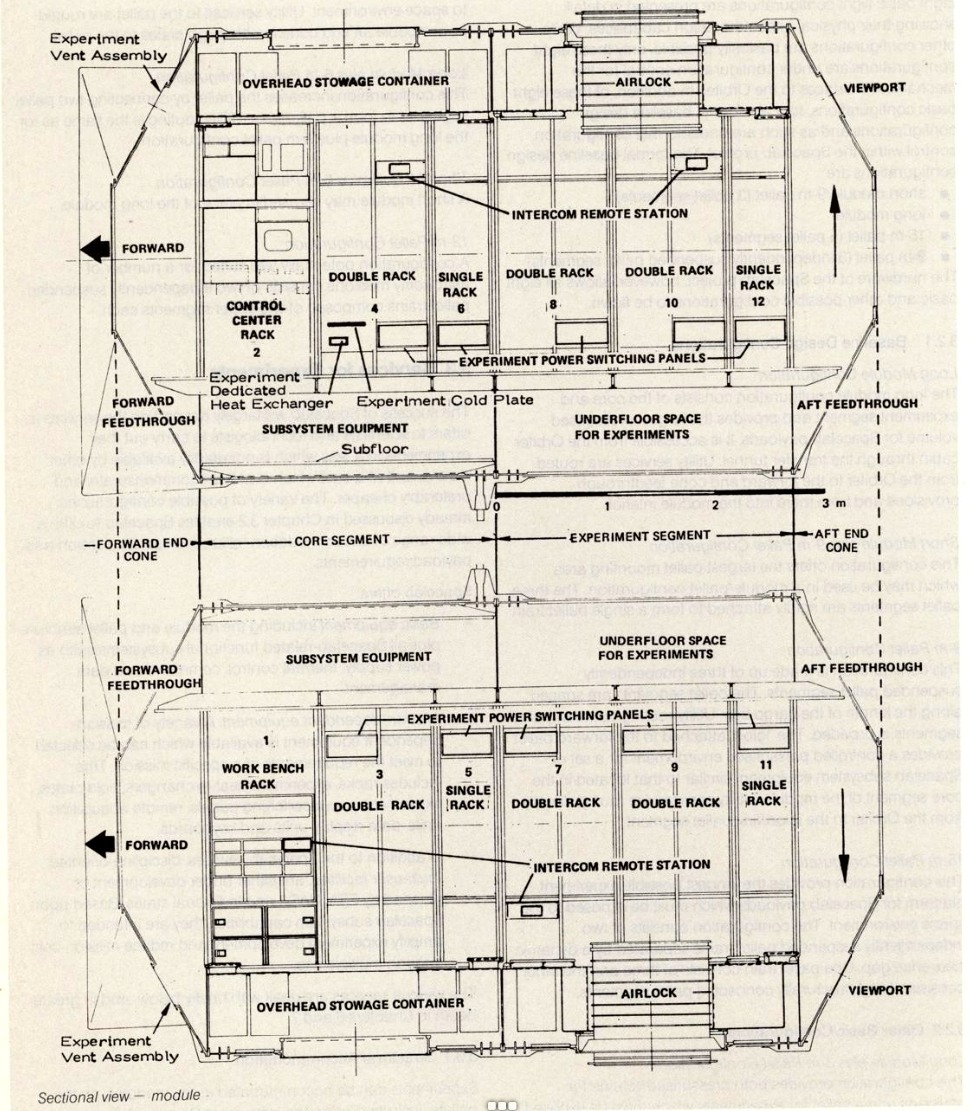
Vue en coupe du module double
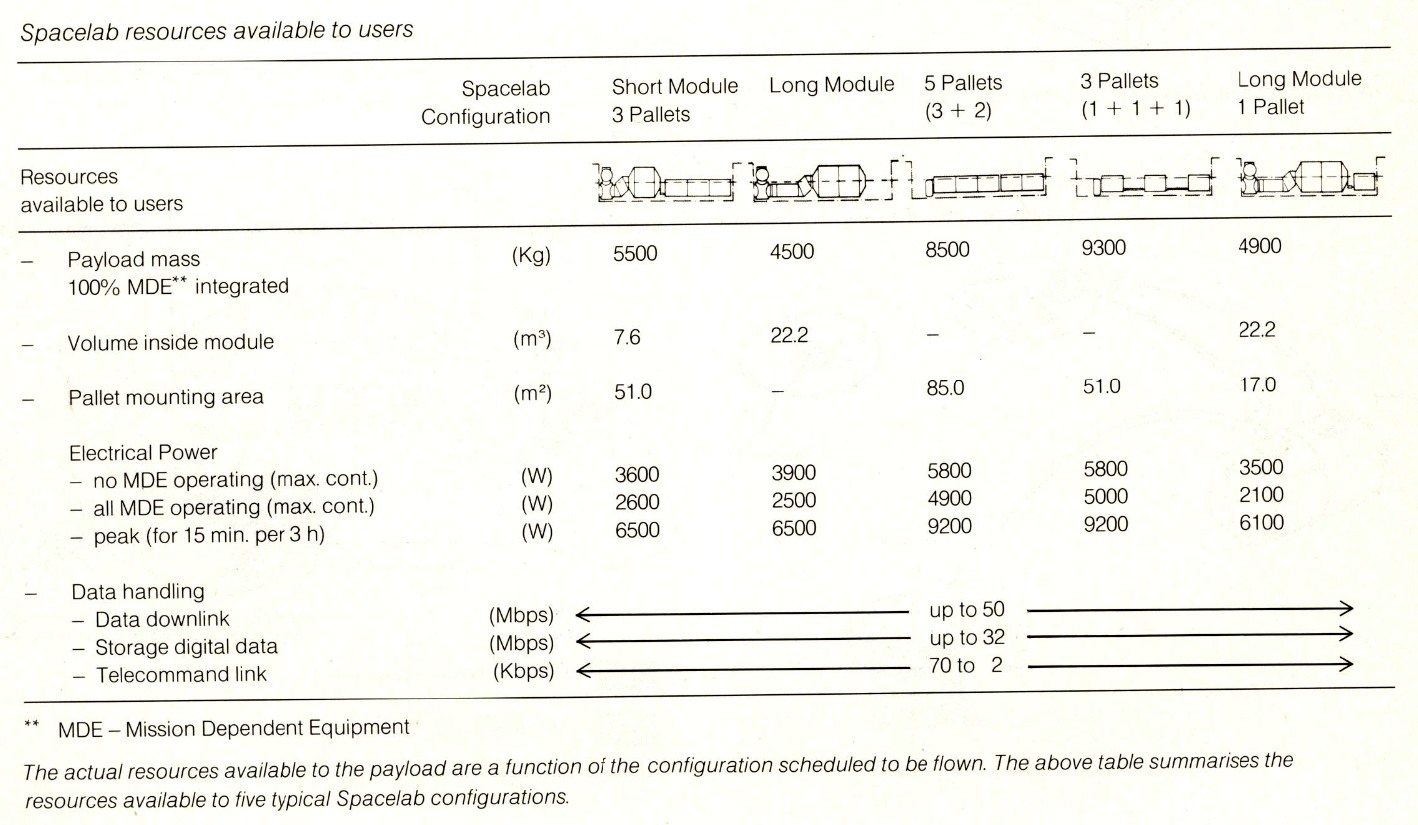
Tableau des ressources pour les utilisateurs du Spacelab sur les 5 configurations type du Spacelab Dans le module, les expériences sont logées dans des " racks " simples ou doubles ou dans des containers en hauteur ( sous le plancher dans le segment expérience). Les expériences qui doivent être contrôlées directement par l' équipage sont logées soit dans le sas, soit sur les hublots, ou les deux à la fois pendant la mission (ils sont rangées à l' abri au lancement et au retour). Les racks standards sont des 19 pouces, soit 48 cm de large. Dans ces rangements sont fixées toutes les expériences et appareils de mesures, contrôle, visualisation… Ils sont réalisés en aluminium 7075 T73 et assemblés par rivets et boulons. Les points d' attache supérieur sont usinés en titane 6AL4V.
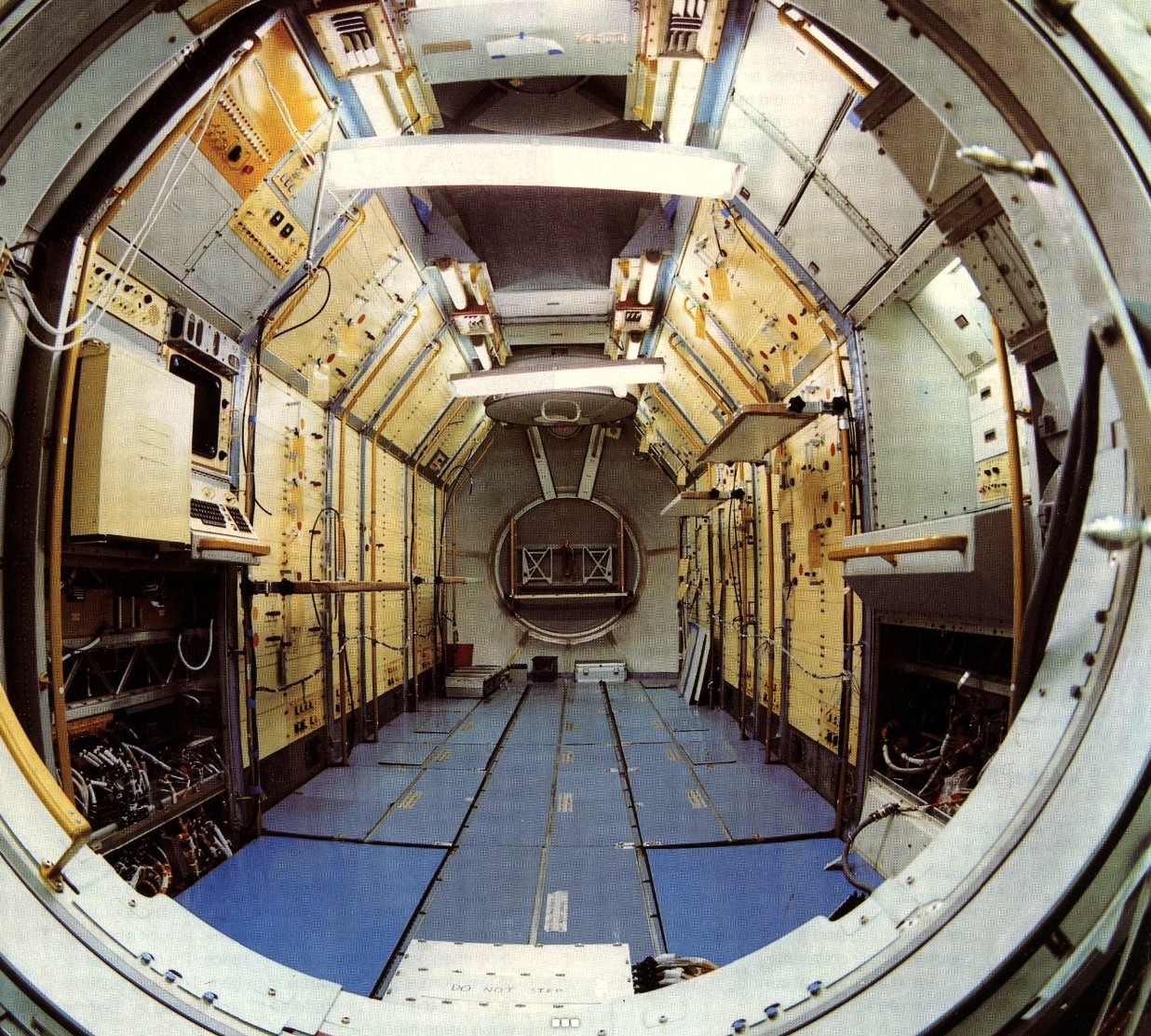
Pour l'aménagement intérieur, les ingénieurs ont suivi les conseils des astronautes de Skylab, Owen Garriott et Bob Parker. Ils ont finalement opté pour un sol plus sombre et un plafond plus clair, car les astronautes préfèrent s'orienter ainsi. Au départ, il était envisagé des chaussures à fixer au sol, mais ils avaient déjà essayé sur Skylab. À la place, il a été opté pour des boucles en tissu souple dans lesquelles on pouvait glisser les pieds, car en apesanteur, les jambes gênent. Deux doubles racks offrant un volume de 1,75 m3 et une capacité de 580 kg chacun, plus deux simples racks offrant 0,9 m3 et 290 kg chacun peuvent être installés dans le segment principal du module. Quatre doubles et deux simples racks peuvent être installés dans le segment expérience.
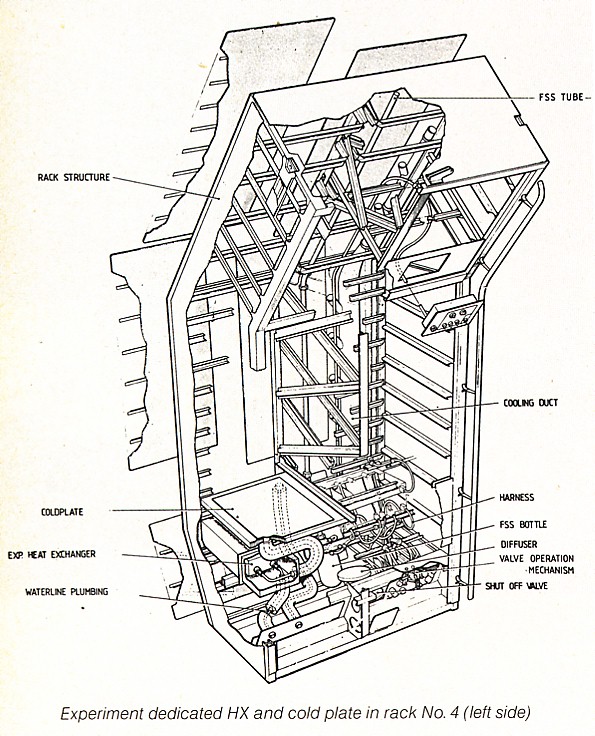
La deuxième section, appelée segment d'expérimentation, fournit
une zone de travail pressurisée supplémentaire, de l'espace pour des supports
d'expérimentation supplémentaires et des dispositions pour le montage de la
fenêtre ou d'un sas scientifique conçu pour permettre d'exposer les expériences
réalisées dans le module à l'environnement spatial.
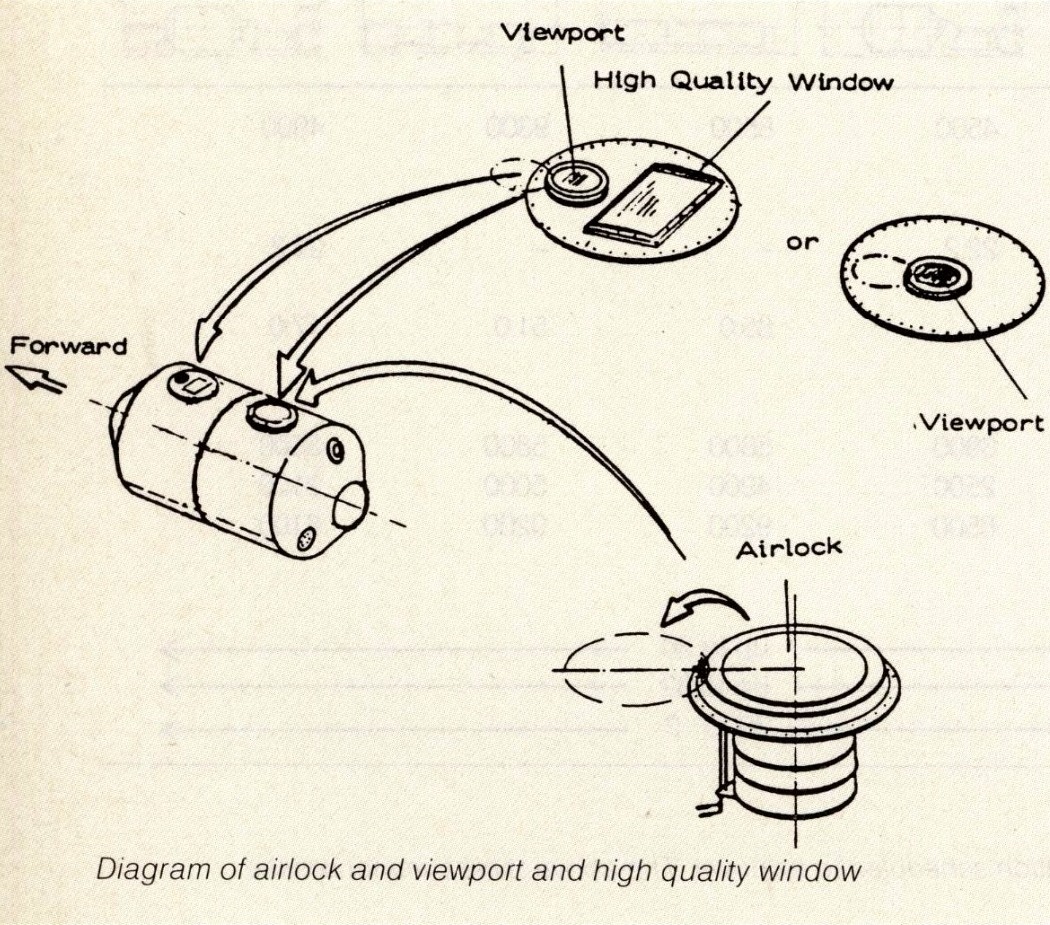
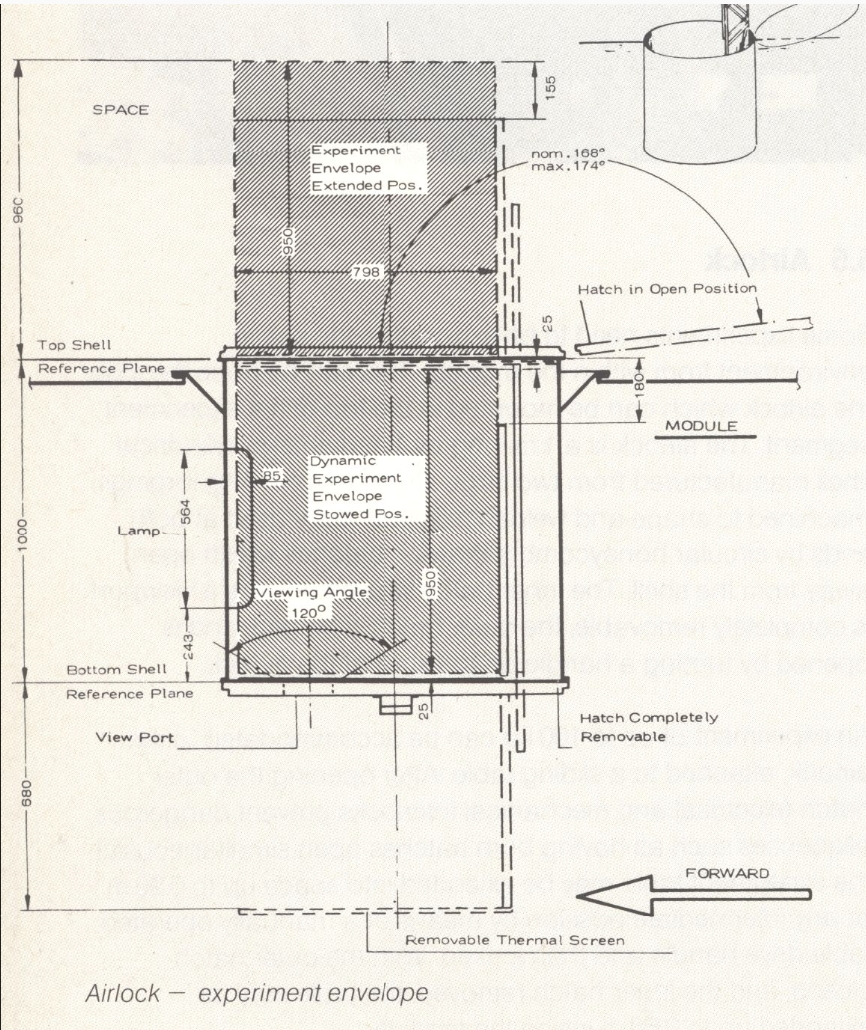
Le sas permet l' exposition des expériences dans l' environnement de l' espace depuis l' intérieur du module. Le sas est un cylindre de 1 m de diamètre sur 1 m de long. Des écoutilles le ferme de chaque coté, les expériences étant fixées sur une table coulissante qui sort de 96 cm dans l' espace. Les hublots ont 30 cm de diamètre, ils sont conçus pour les modules Spacelab et offrent un excellente vue de la terre et de l' espace. Ces hublots permettent aussi de réaliser des photos grâce à leur grandes qualités optique.
Les Américains ont tout l’argent, contrairement à l'Europe. Il faut trouver des solutions plus simples. Par exemple, pour le sas scientifique de Skylab, au lieu d'une conception complexe avec de multiples loquets, les sous-traitants ont imaginé une trappe intérieure très simple mais efficace : une simple pièce métallique ronde maintenue en place par la différence de pression entre la cabine et l'intérieur du sas. Le commandant John Young n'a pas du tout apprécié cette conception, mais elle a passé avec succès l'examen critique de conception ; il n'a donc pas pu nous obliger à la modifier.
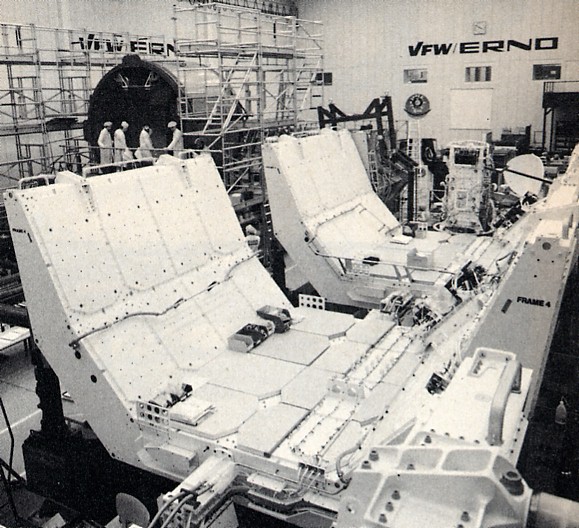
SPACELAB LOGISTICS PALLET, IGLOO & IPS
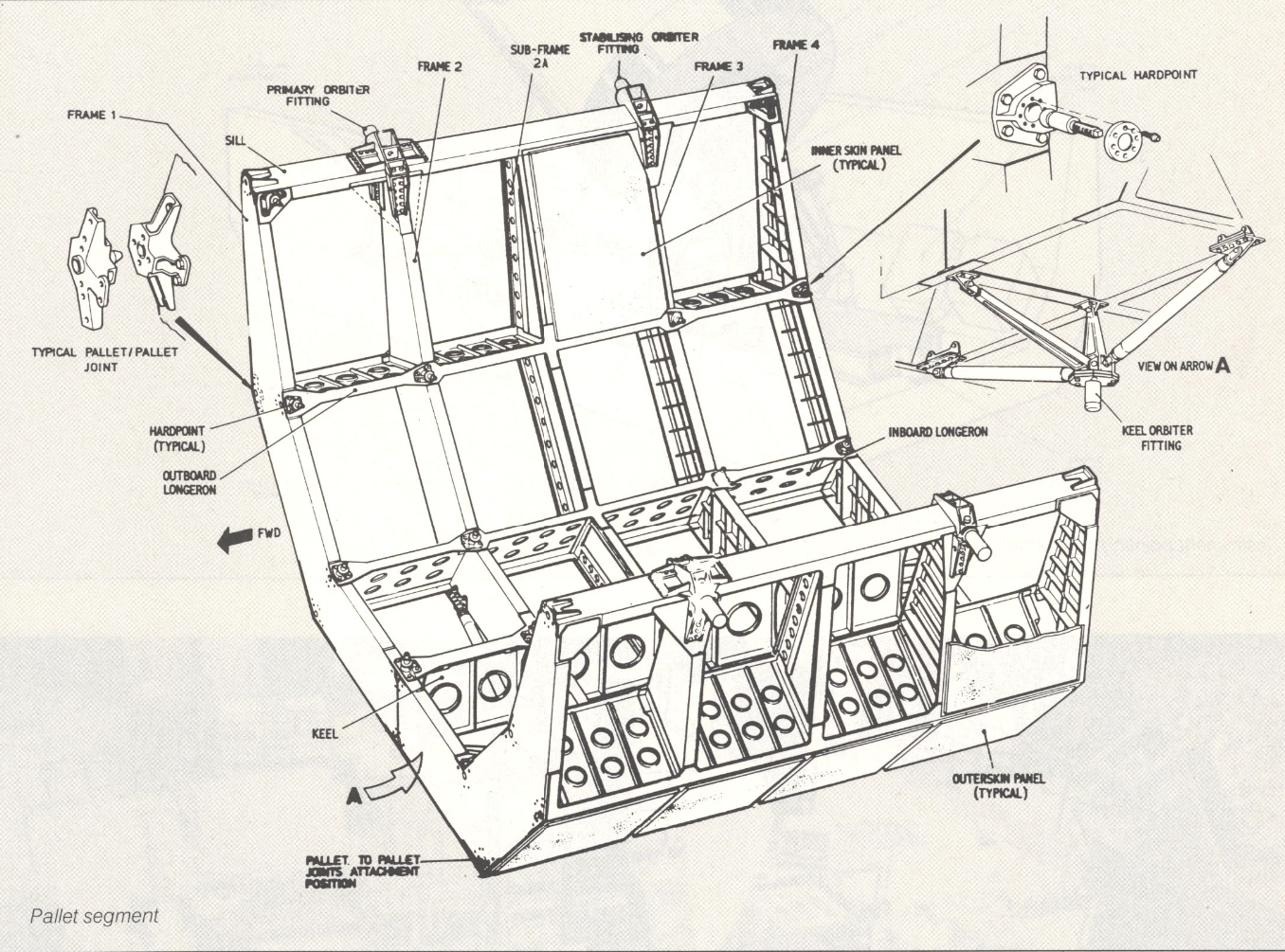
Les palettes ont une section en forme de " U
" . Elles sont pourvues de points d' attache solides pour le montage des
expériences lourdes et de grands panneaux destinés à loger les éléments des
charges légères. Les palettes mesurent 3 m de long sur 4 de large. Elles
peuvent être toutes seules dans la soute de l' Orbiter ou assemblées en train avec
trois éléments. Dans le cas d' un assemblage individuel, il y en a au maximum
5 reliées entres elles par une goulotte de servitude. _ Une palette seule, 3110 kg sans igloo et 2880
kg avec l' igloo.
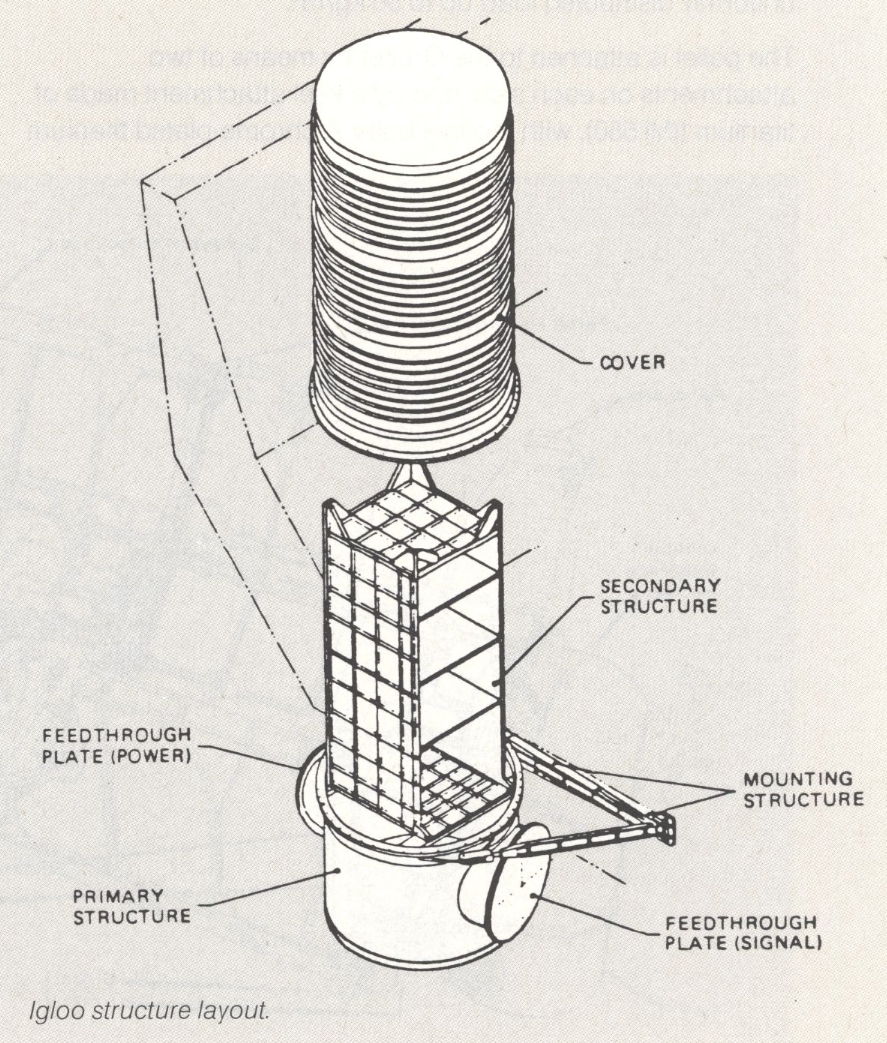
Sur les palettes sont montées 24 panneaux " intérieurs " et 24 panneaux " extérieurs " en nid d' abeille d' alliage d' aluminium. Les panneaux internes sont pourvus de points d' insertion taraudés permettant de fixer les matériels des sous systèmes. Chaque panneau peut supporter jusqu' à 50 kg par m2 de charges uniformément réparties. 24 points de fixations standards en titane usinés chromés sont prévus pour les charges utiles. Mais les charges peuvent " débordées " sous réserve que des dispositions spéciales soient prises pour leur installation. En configuration palettes seules, les équipements du sous système sont logés dans un " Igloo " sur le devant de la première palette. L' igloo est un cylindre, localement rigidifié, constitué d'anneaux forgés d'aluminium, fermé en bas et doté d'une bride de montage à sa partie supérieure. Le couvercle est également une coque cylindrique en alliage d'aluminium, fermée en haut, qui s'adapte à la bride supérieure de la structure primaire comme une poubelle inversée. Les équipements du sous-système sont montés sur une structure secondaire articulée au niveau de la ligne d'accouplement du couvercle pour permettre l'accès à la partie inférieure de cette dernière. Des ouvertures dans l'igloo sont prévues pour le passage des conduites et la décompression. Le volume offert est de 2,2 m3, pour des mensurations de 2,4 m de haut et 1,1 m de diamètre. L'Igloo est positionné dans le cadre avant de la palette la plus la plus avancé dans la soute. LA SABCA a aussi développé les structures de support des équipements pour transporter les conduites de fluides et les faisceaux de câbles entre le module et une palette fixée ou entre des palettes montées séparément. Ces supports en porte-à-faux variaient en longueur de 160 à 750 millimètres selon la taille de l'espace à combler.
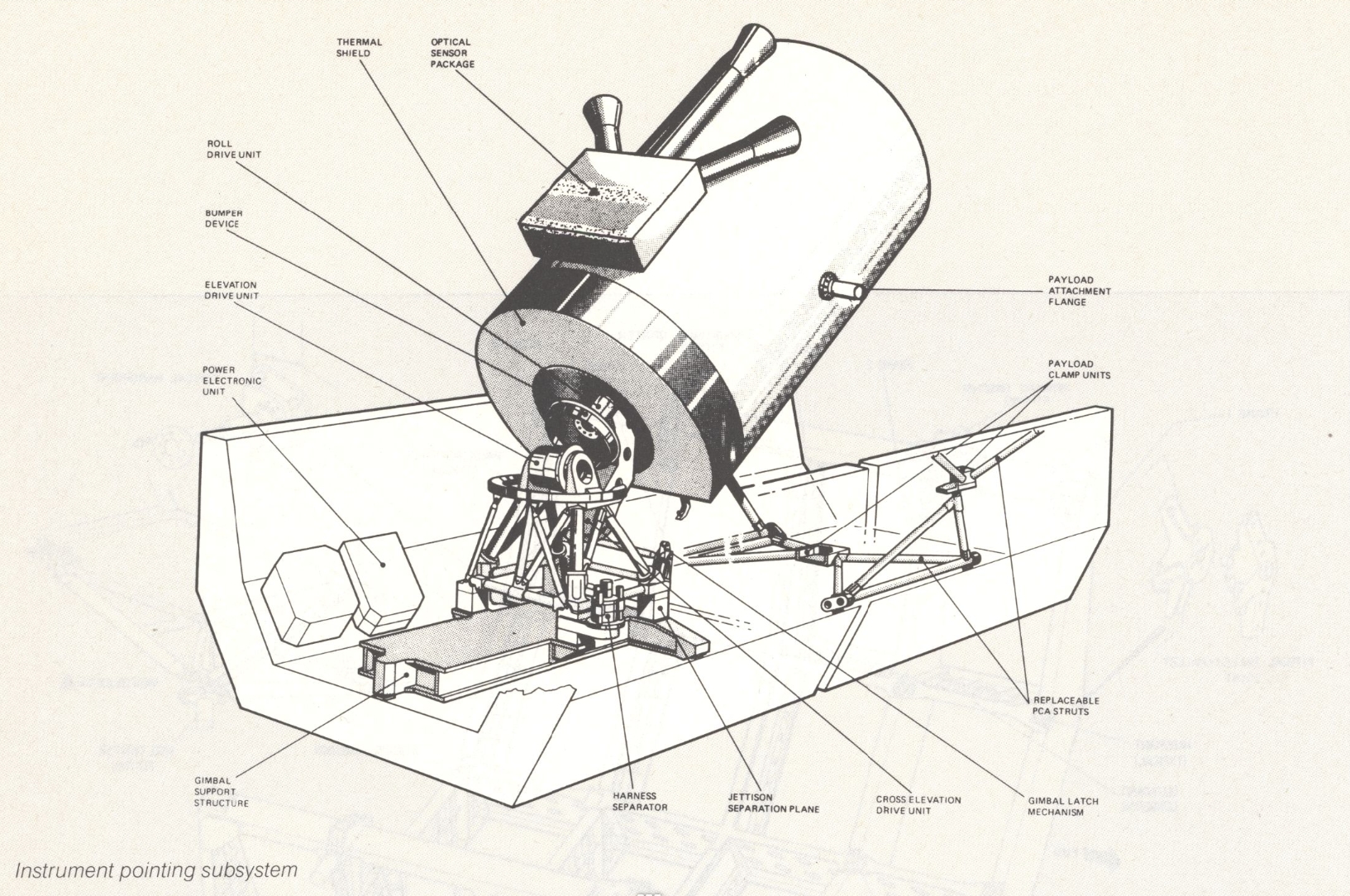
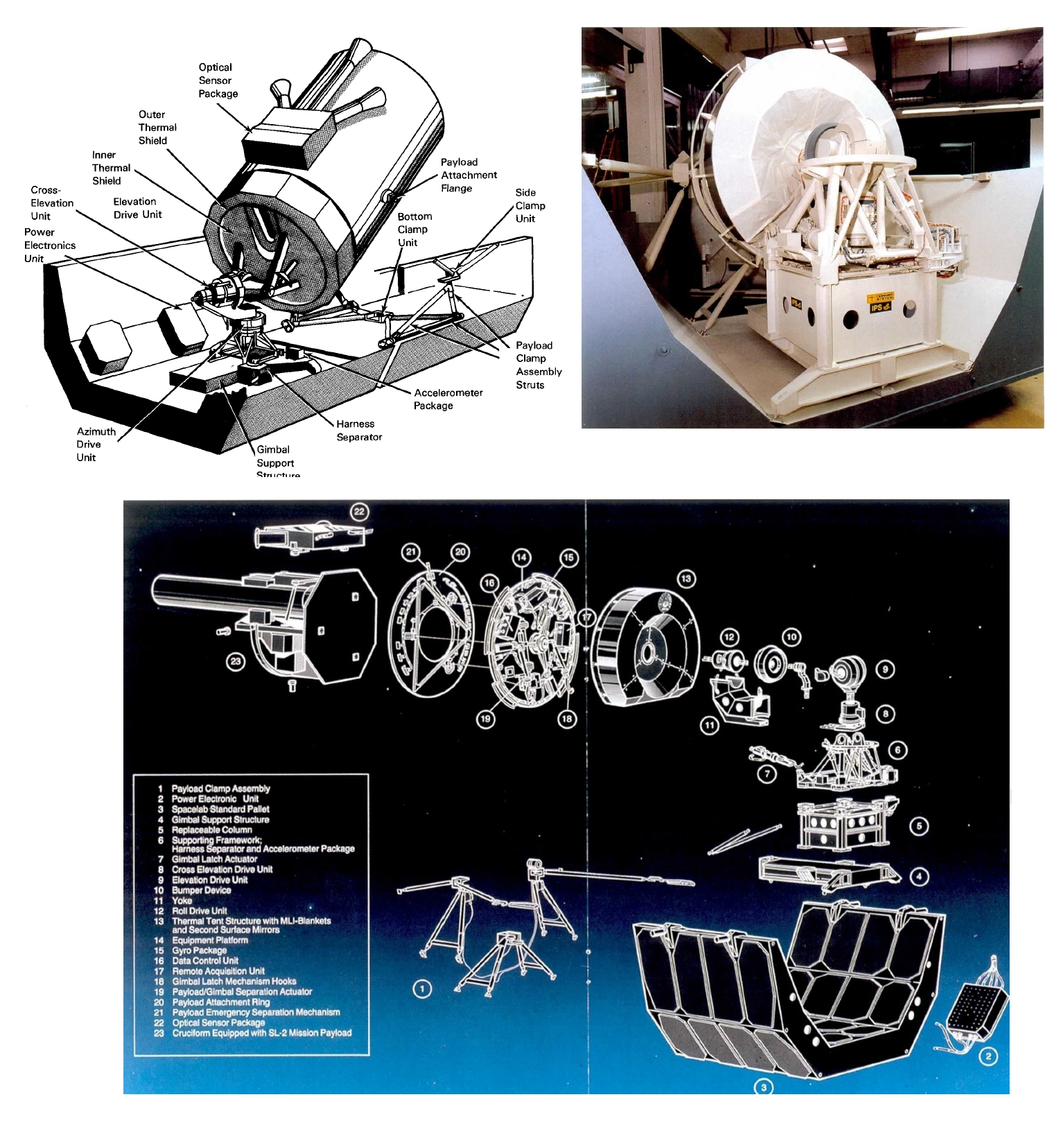
Fabriqué par la SABCA à Bruxelles, l'Igloo a subit de nombreuses modifications de conception, en taille et orientation passant de d'horizontale à verticale. L' IPS, Instrument Pointing System ou système de pointage des instruments est un appareil de pointage d' une grande souplesse d' emploi qui assurera à toutes les expériences scientifiques installées sur l' Orbiter une précision et une stabilité de pointage très fine. Grâce à son système à cardans stabilisés sur trois axes, il peut orienter des charges d' un poids maximal de 2000 kg avec une précision de l' ordre de la seconde d' arc.
Pour l'IPS, utilisé pour diriger les télescopes et autres instruments sur les palettes externes, au lieu d'un ensemble de grands anneaux pour le manœuvrer, un ingénieur a imaginé un tube droit boulonné sur une seule plaque, mû par trois moteurs beaucoup plus petits. L'approbation du centre Marshall a pris beaucoup de temps. C'était tellement innovant que les ingénieurs ont envisagé de le breveter, mais faute de temps, les ingénieurs ont décidé de le construire. En examinant l'IPS, les astronautes souhaitaient un panneau de contrôle manœuvrable à l'aide d'une poignée – ils voulaient tout contrôler. Mais les ingénieurs ont dû refuser ; ils le contrôleraient en saisissant des coordonnées. L'IPS devait intégrer un logiciel anticollision, car sinon il risquait de heurter des éléments de la navette, comme les radiateurs, et de causer des dommages. Cela a nécessité beaucoup de combats ; nous ne pouvions pas laisser trop de liberté aux astronautes.
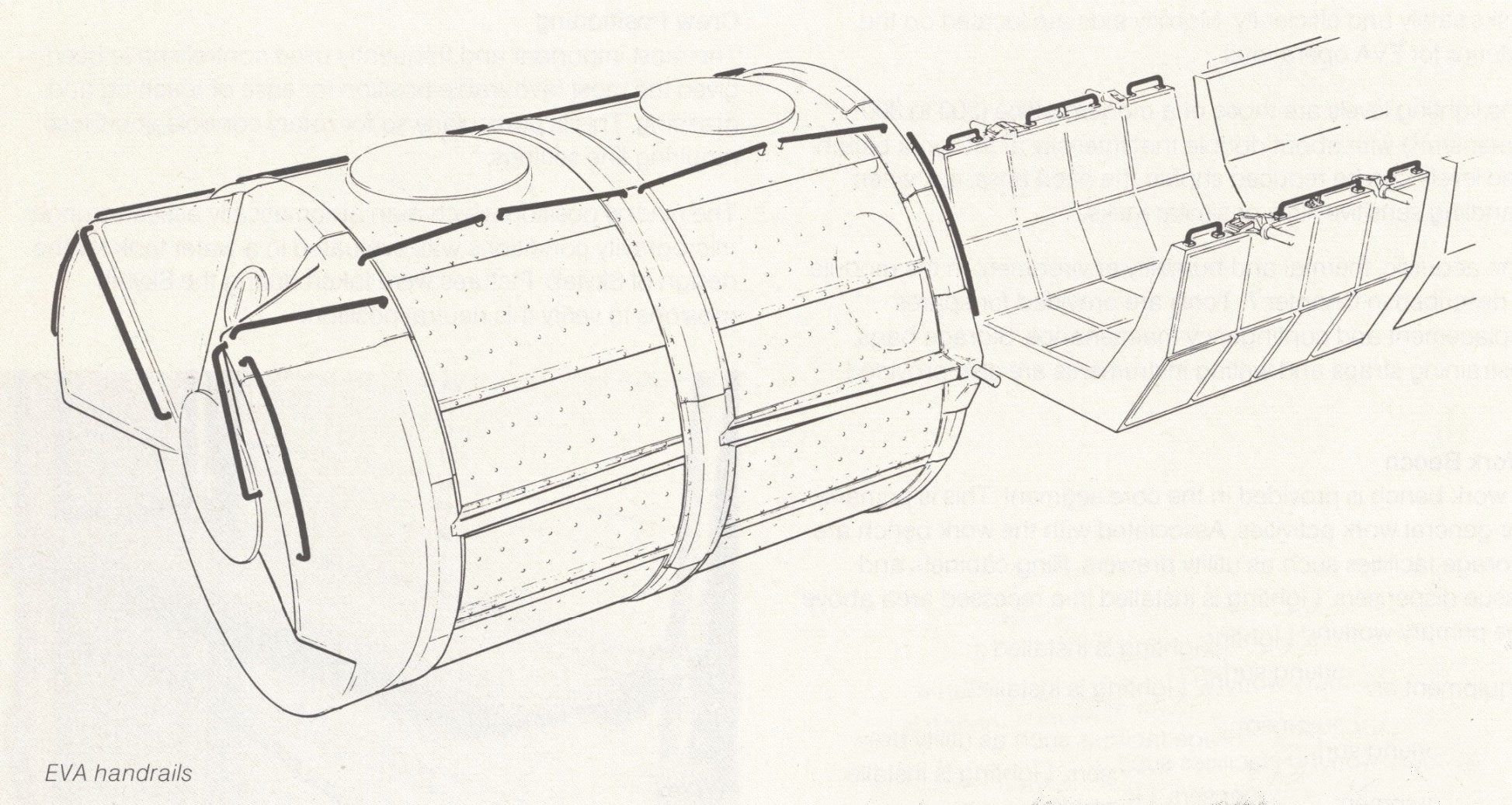
TUNNEL DE TRANSFERT
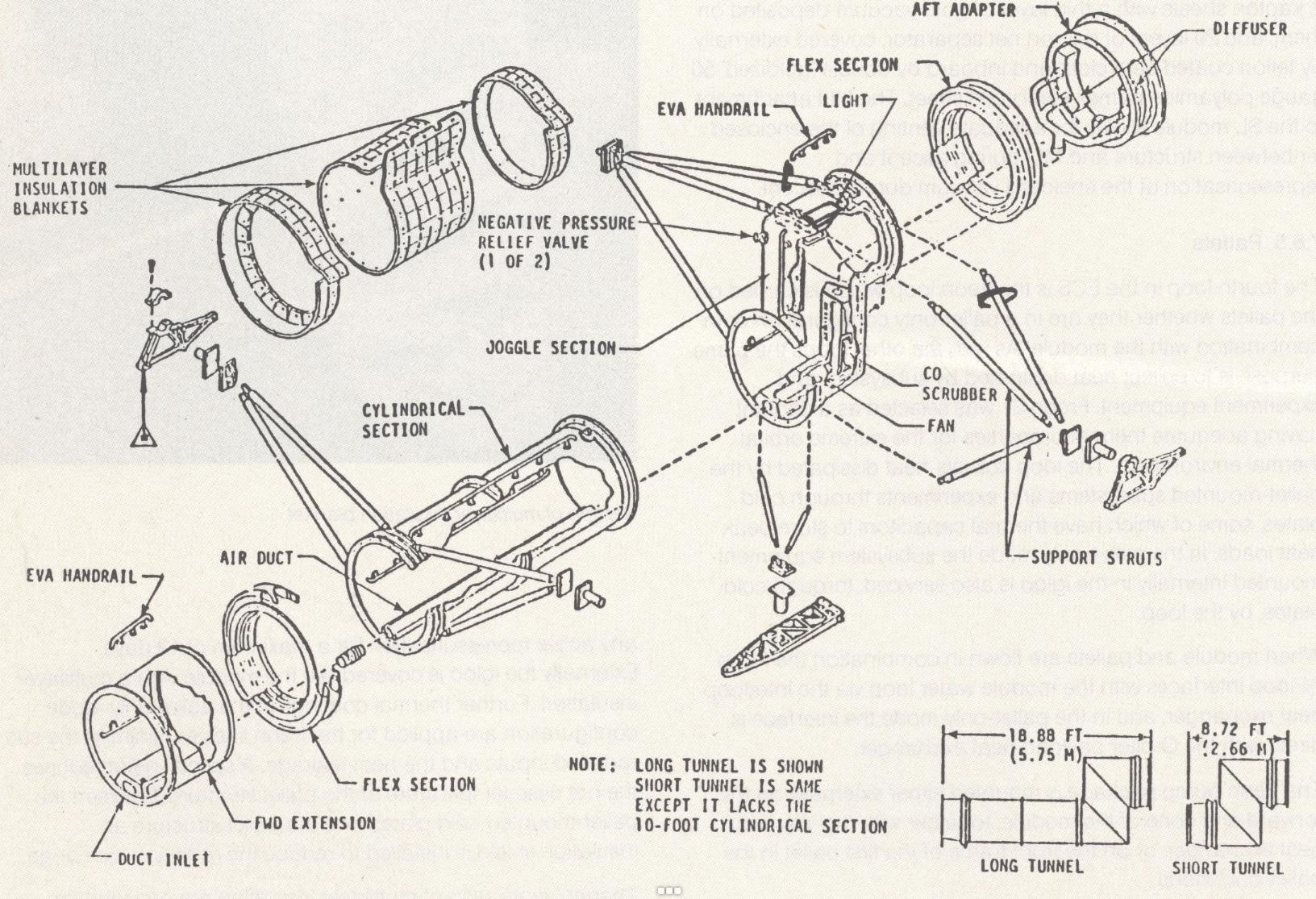
Cet élément est fourni par la NASA. Le tunnel est
capable de transférer l' équipage et les expériences de l' Orbiter au
laboratoire. D' un diamètre intérieur de 1 m, il est équipé de lumière et
de
rampes pour les mains et son atmosphère est la même que dans la cabine et le
module. Il permet le passage de deux hommes en sens inverse, en même temps.
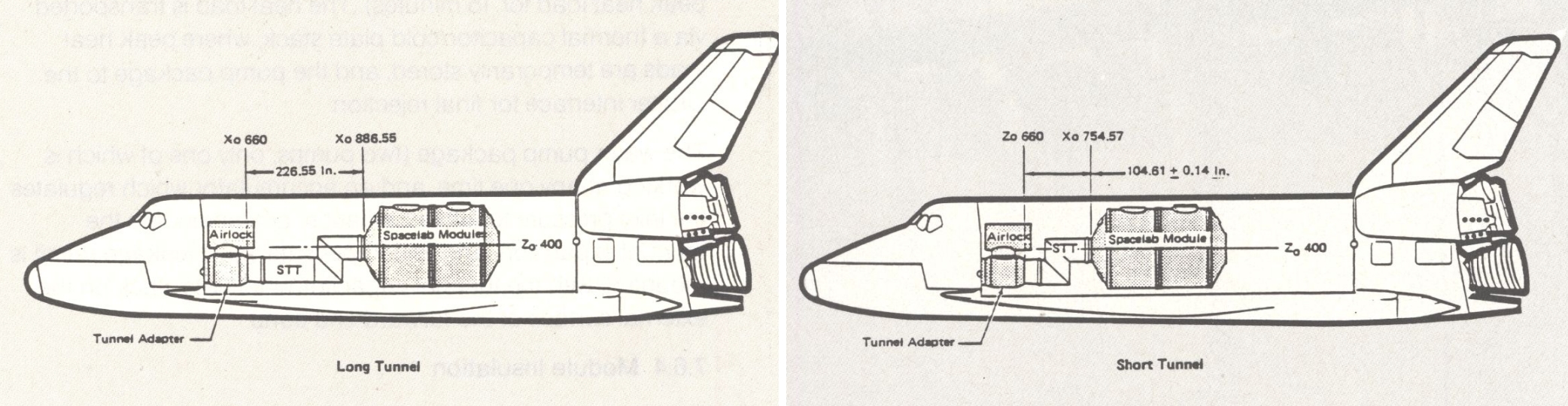
Deux tunnels peuvent équipés la soute de l' Orbiter, selon la position du
module, un long de 5,75 m et un court de 2,66 m. Le tunnel est réalisé en
feuilles d' aluminium 6061 forgé à la machine et les segments flexibles sont
en Viton protégé par du Nomex.
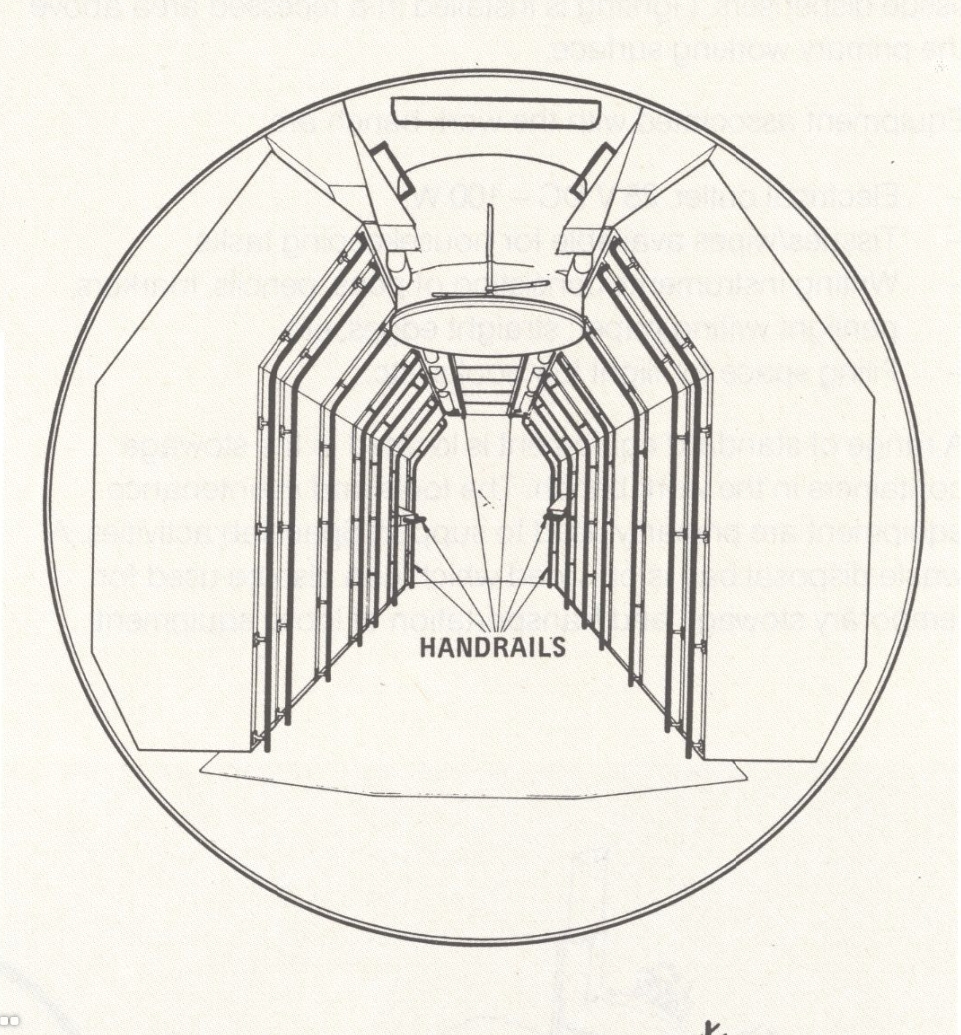
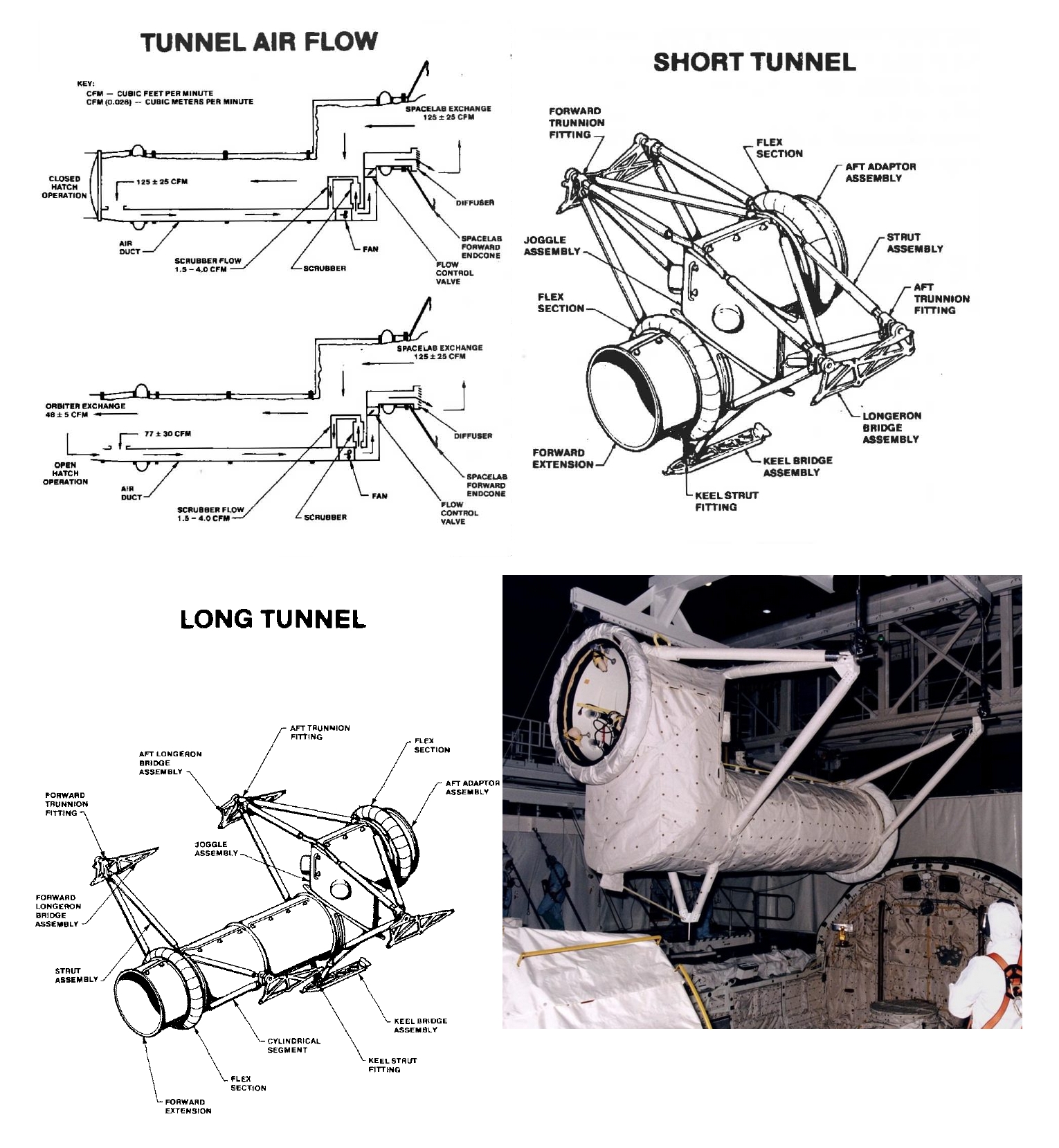
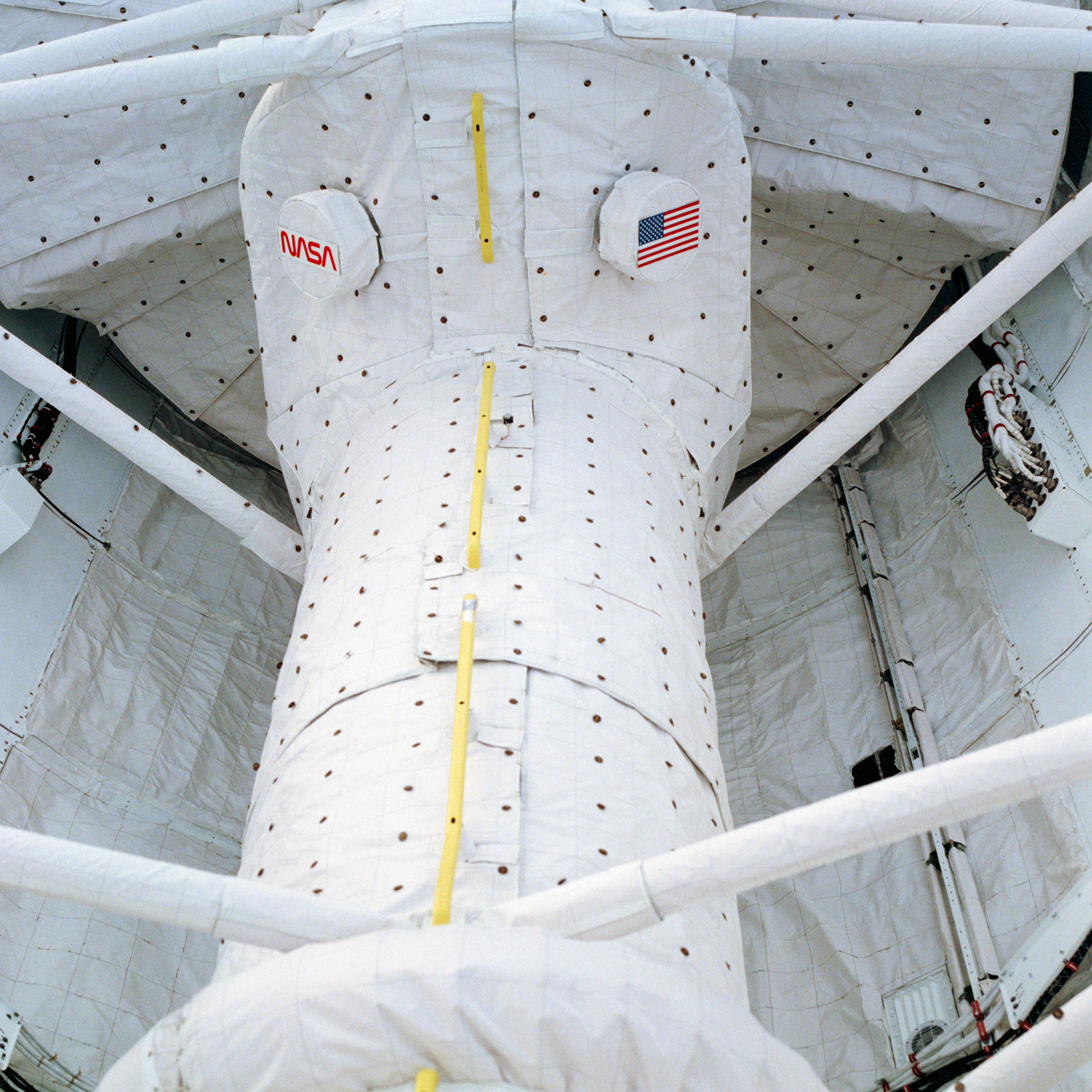
C'est Mc Donnel Douglas qui a conçue le tunnel du Spacelab en 1977. Dès 1974, la NASA avait décidé de mettre le module pressurisé à 2 endroits dans la soute de l'Orbiter, ce qui impliquait 2 tunnels, un court ou un long. De plus, l'entrée du module étant centrale, il a été décidé de placer la partie centrale en bas de la soute, ce qui impliquait une section décalé pour rejoindre le middeck de l'Orbiter. La partie en "Z" fut délicate à réaliser et du être renforcées. La revue critique de conception a eu lieu en septembre 1980 et le tunnel livré au KSC début 1982 Le tunnel est attaché dans la soute à la quille et sur les parois par des entretoises et des ferrures, au niveau de la section de 3 m et sur la partie en " zizag ". Extérieurement, le tunnel est recouvert d' une protection blanche, la même que sur le module, fait de 36 couvertures pour le tunnel long et 33 pour le tunnel court. Des "mains courantes" sont fixées le long de la ligne médiane supérieure du tunnel pour faciliter les déplacements lors des EVA.À l'intérieur du tunnel, deux jeux de mains courantes, placés sur des parois opposées, permettent le passage de deux membres d'équipage voyageant en sens inverse.
Installation du tunnel long dans la soute
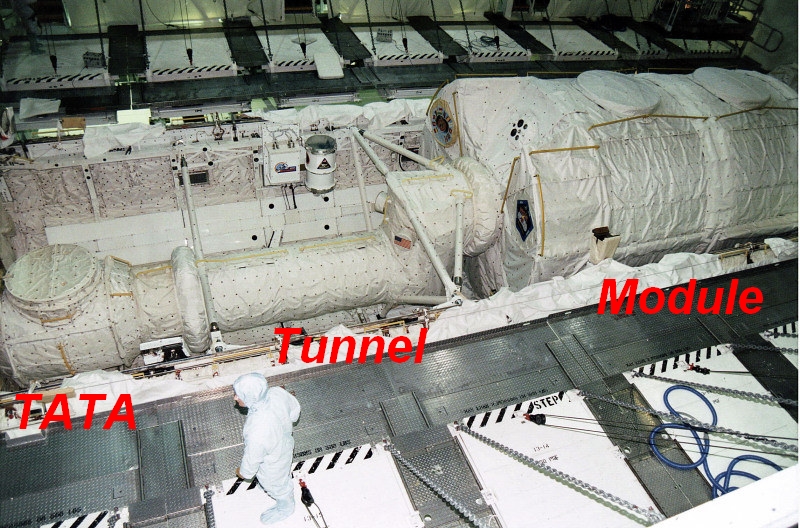
Vues depuis le module vers le tunnel et à l'intérieur de celui-ci Le TATA, Tunnel Adapter Truss Assembly est une structure placée dans la soute de l'Orbiter fournissant une atmosphère pressurisée supplémentaire permettant à l'équipage de se déplacer entre le module Spacelab et l'Orbiter. Sur les missions Spacelab, le TATA permet à l'équipage de passer du pont intermédiaire de l'Orbiter au tunnel du module. L'écoutille, qui est normalement ouverte dans le TATA reste normalement ouverte pendant l'utilisation du tunnel et du module. Cependant, quand le TATA et le sas EVA sont utilisés, la zone habitée peut être isolée en fermant l'écoutille. Il n'y a pas d'écoutille à l'ouverture du module Spacelab. Le Tunnel Adapter vole 21 fois pour le programme Spacelab (STS-9, 40, 42, 50, 55, 58, 65, 71, 74, 76, 78, 83, 89, 94, 91, 95, 96, 101, 106, 116 et 118).
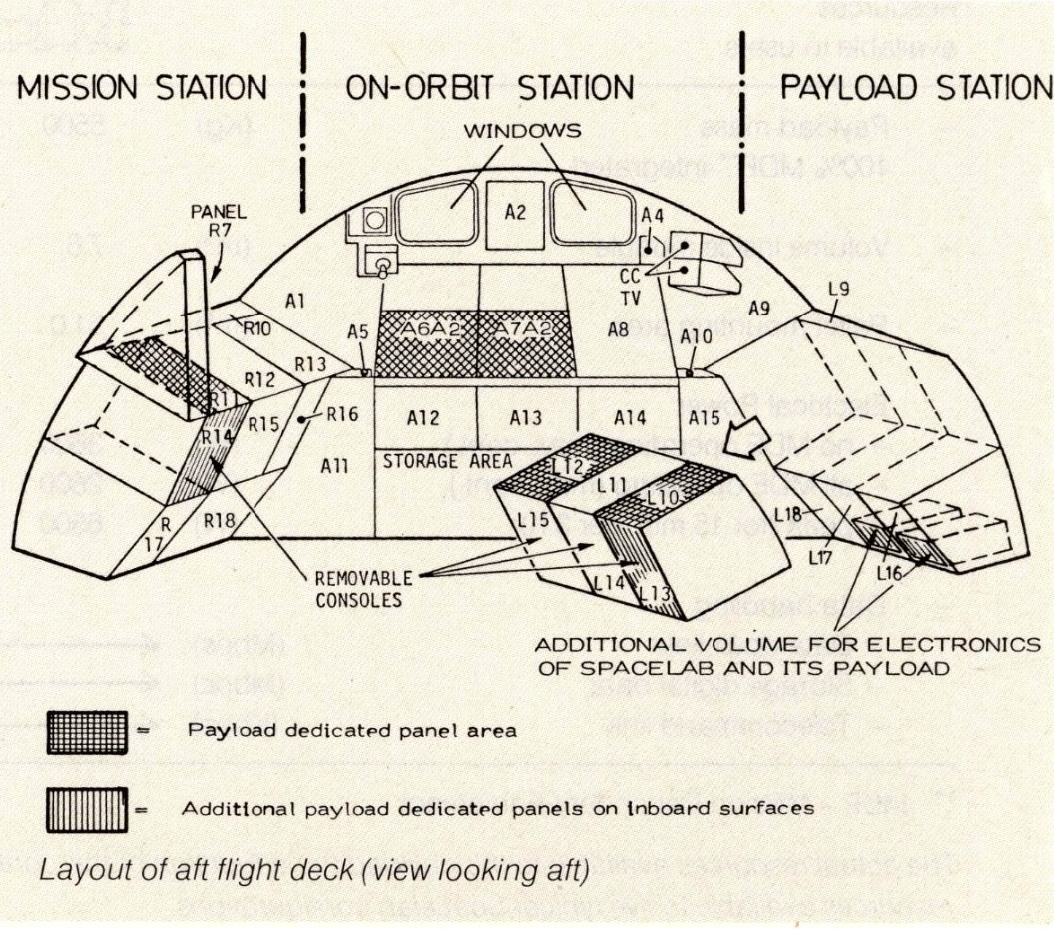
SERVICES POUR LES EXPERIENCES Les expériences peuvent être logées dans le module ou sur les palettes (comprenant l' utilisation de l' IPS Instruments Pointing Systems et l' aire arrière du pont de vol de l' Orbiter OAFD). L' ORBITER AFT FLIGHT DECK
L' aire arrière du pont de vol de l' Orbiter est
divisée en trois zones de travail, Mission Station, On orbit Station et Payload
Station. Les aires disponibles pour les charges du Spacelab dans l' OAFD sont
très limitées et ne sont utilisées jusqu' à présent que pour les
échantillons biologiques au dernier moment.
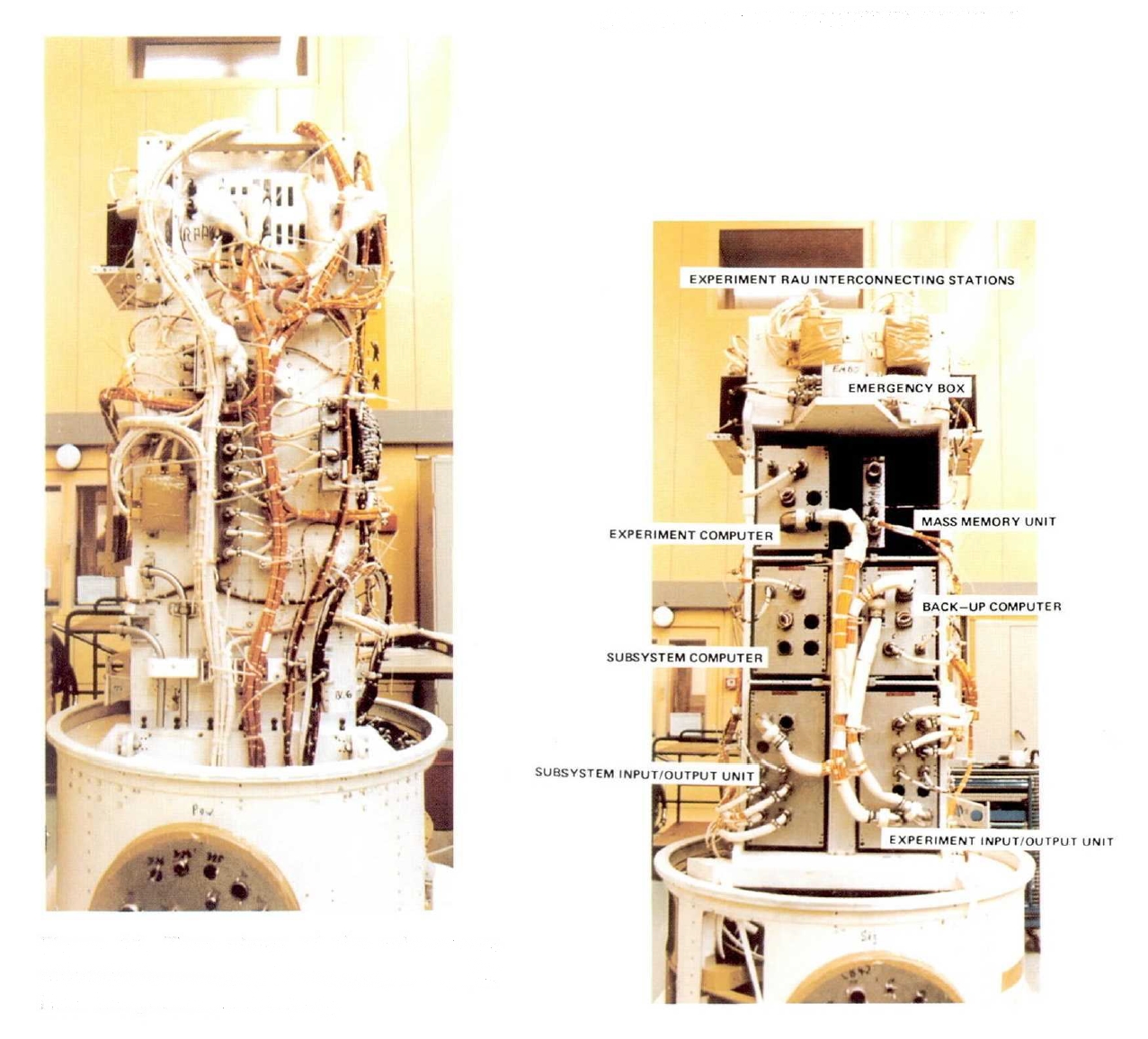
COMMAND & DATA MANAGEMENT SYSTEM, CDMS Le CDMS est le système gérant les commandes et les données principales du Spacelab. Il stocke, dispatche et transmet toutes les données. ELECTRICAL POWER DISTRIBUTION SUBSYSTEM, EPDS La puissance électrique disponible dans le Spacelab
vient des piles à combustibles de l' Orbiter qui délivrent 7 kW sous 28 V
continu. Le système distribue du courant continu et alternatif aux
sous-systèmes du Spacelab et aux expériences sur un système de " buss
" complètement séparé au travers du EPDB, Electrical Power Distribution
Boxes. En courant continu : En courant alternatif : OPERATION AU SOL/ INTEGRATION
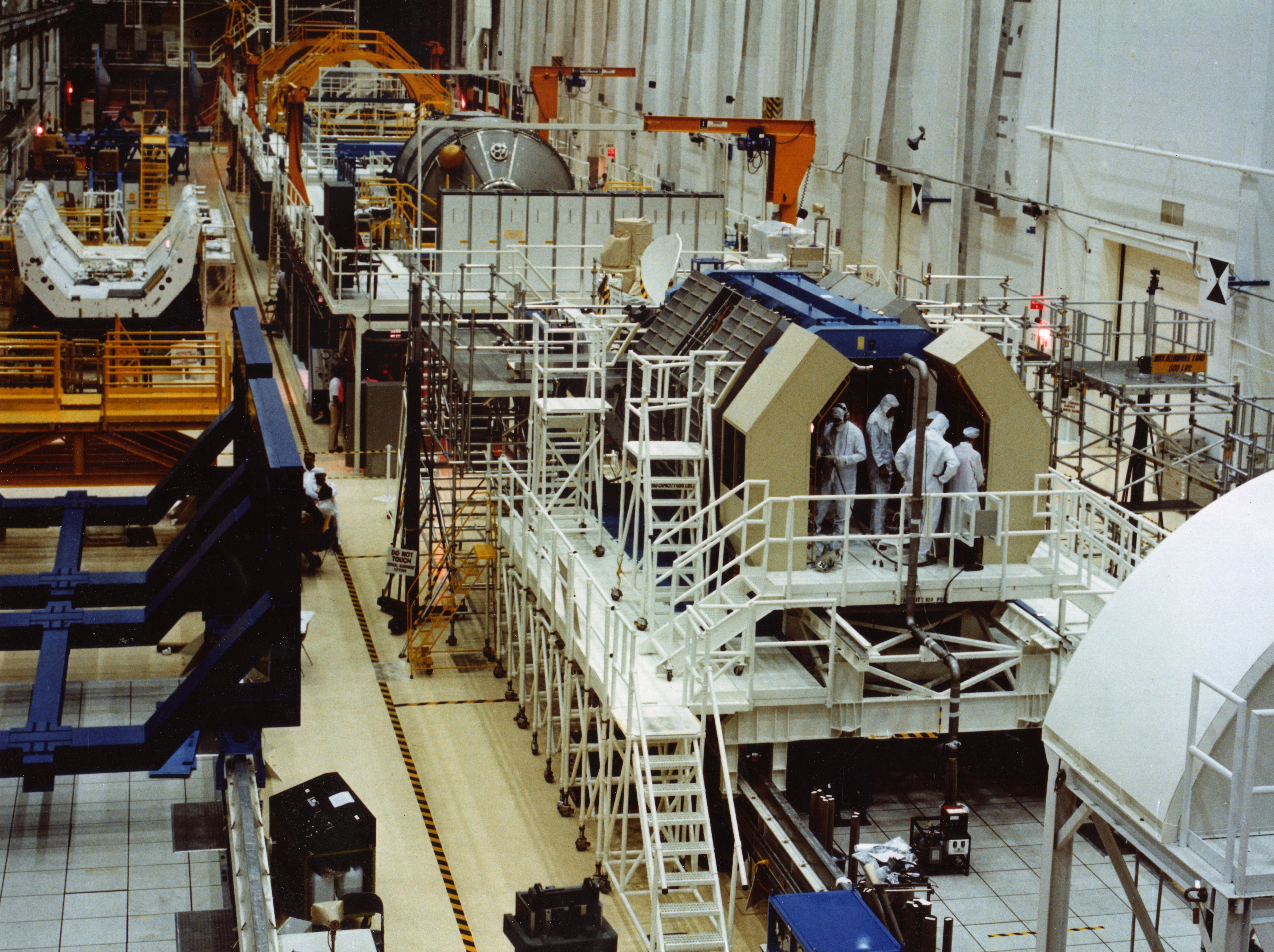
L' intégration de tous les éléments du Spacelab,
module, palettes, rack, expériences est réalisée dans l' Operation &
Checkout Building, l' O &C B situé dans la zone industrielle du KSC. Ce
bâtiment hérité du programme Apollo sert à l' intégration des charges
utiles STS à l' horizontale comme le Spacelab, qui est d' ailleurs la seule
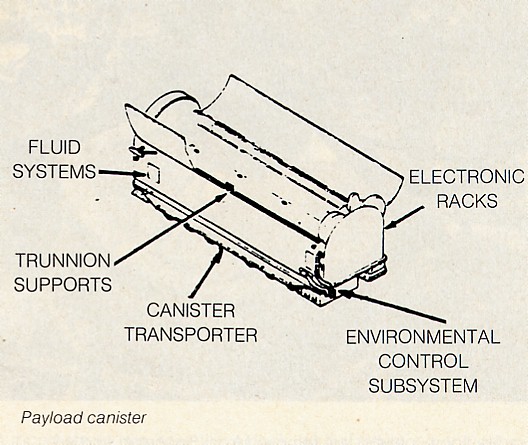
charge utile intégrée dans le bâtiment. Installé dans le Canister
Transporter, le Spacelab est transporté dans l' OPF de l' Orbiter pour être
mis dans la soute. Le premier pas dans l' intégration du Spacelab est la mise en place des composants du laboratoire tel que les palettes et les racks dans les conditions requises pour la mission dans une des deux aire de maintenance du bâtiment. Intégration des expériences. Niveau 4. Les équipements pour les expériences sont testés avant toute installation dans les racks ou les palettes par les expérimentateurs eux même si c' est possible. Les expériences sont connectées au simulateur des sous systèmes Spacelab, le PCU. Ces mêmes sous systèmes sont auparavant testés séparément et ensembles. L' ensemble est déplacé dans une des deux baies d' intégration de l' O & C B.
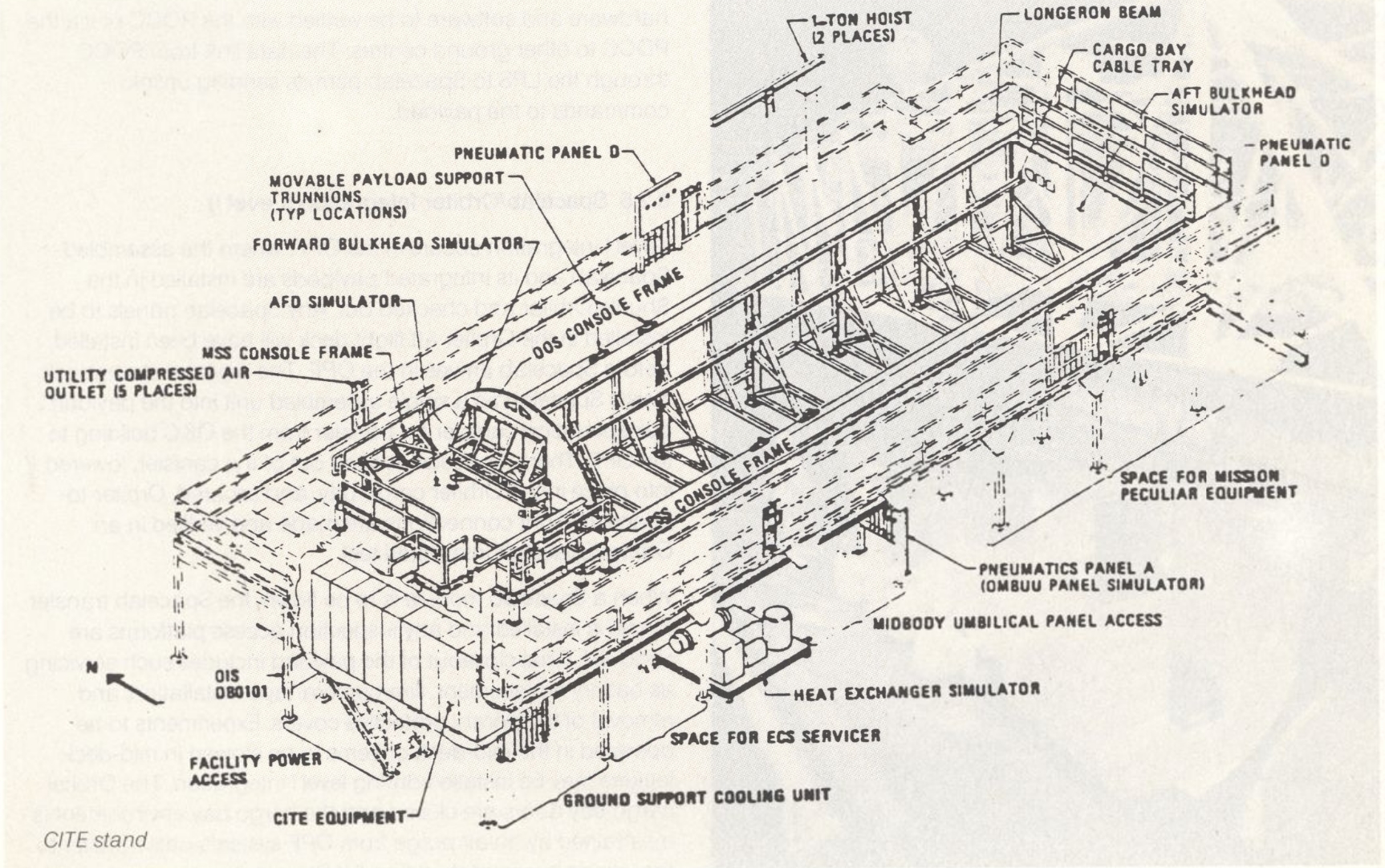
Intégration Spacelab/ expériences. Niveau 3 et 2. Pour une mission avec un module, les expériences dans les racks et sous le plancher sont " roulés " dans le module qui est ensuite fermé à l' arrière par son cône. Toutes les connections sont réalisées avec les palettes et les expériences avec les sous systèmes Spacelab. Dans cette phase de nombreux tests sont effectués pour simuler la mission, le fonctionnement des appareils et des expériences. Une simulation avec une maquette de la soute de l' Orbiter est réalisée. Cette maquette , le CITE Cargo Integration Test Equipment, comporte tous les éléments de l' Orbiter, la soute et le cockpit et permet de vérifier la compatibilité Spacelab/ Orbiter. Le Cite permet aussi des tests de liaison avec le centre Spacelab de Houston, le POCC Payload Operation Control Center.
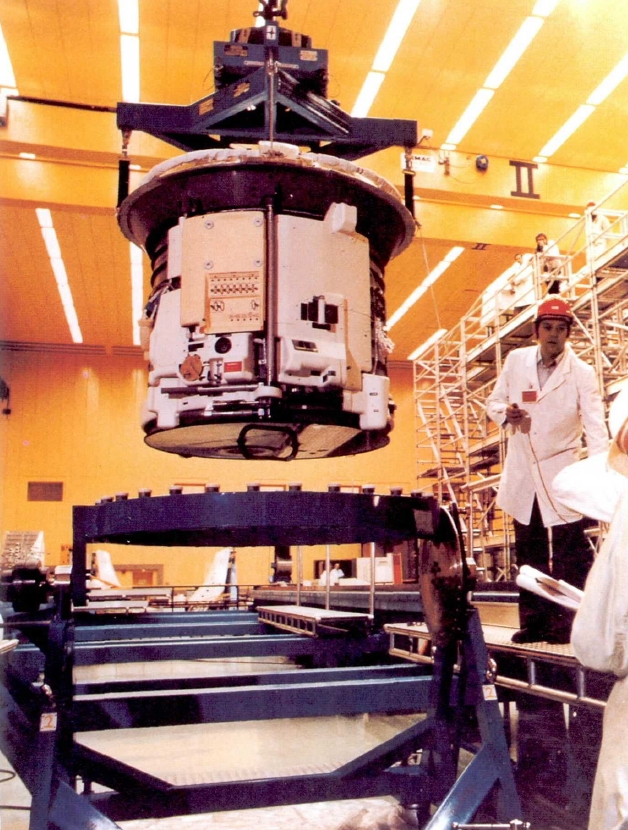
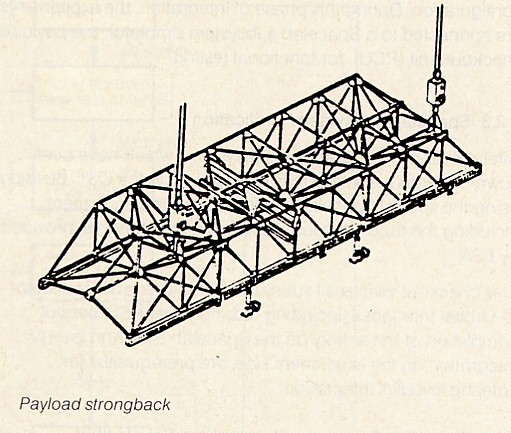
Intégration Spacelab/ Orbiter. Niveau 1. A l' aide du " Strongback ", une structure
rigide en tubes d' acier équipée de câbles et mécanisme d' attache et de balance pour s'
accomoder à toutes les charges utiles STS, le Spacelab est soulevé de son
stand et hissé dans le Canister transporter. Le Strongback est conçu pour des
charges de 4,57 m de diamètre et 18 m de long pesant 29492 kg.
L' opération rollover consiste à amener l' Orbiter dans le VAB pour l' assembler à son stack de propulsion. Pendant le transport vers le pad de tir, la soute est purgée avec de l' air conditionné. Sur le pad, sont vérifiées les connections STS/ Spacelab et pad de tir, l' accès au laboratoire étant très limité. Pendant le compte à rebours, un dernier accès au Spacelab par le tunnel permet d' installer les expériences de dernières minutes et les spécimens biologiques. En aucun cas, un accès est prévu par la soute.
LES OPERATIONS POST VOL Le processus de désassemblage est essentiellement le processus inverse de l' intégration. Après l' atterrissage, seules les expériences présentes dans la cabine peuvent être retirées rapidement. Ce n' est que lorsque l' Orbiter est à nouveau dans l' OPF que l' accès à la soute et au module est possible. Le Spacelab est extrait de la soute par le Strongback et ramené dans l' O & C B dans le Canister. Enfin, les films, échantillons, les données et les expériences sont récupérées et renvoyées à leur investigateur. Le module et les palettes sont démontés, nettoyés, remis en état pour une autre mission. Texte d' après le Spacelab Data Book une publication de l' ESA de septembre 1983 écrit par Norman Longton
|